Nội dung toàn văn Tiêu chuẩn ngành 10TCN 491:2001 về máy nông lâm nghiệp và thủy lợi - đánh giá rung động của máy - phương pháp đo trên các bộ phận không quay tại hiện trường do Bộ Nông nghiệp và Phát triển nông thôn ban hành
TIÊU CHUẨN NGÀNH
10TCN 491:2001
MÁY NÔNG LÂM NGHIỆP VÀ THUỶ LỢI - ĐÁNH GIÁ RUNG ĐỘNG CỦA MÁY - PHƯƠNG PHÁP ĐO TRÊN CÁC BỘ PHẬN KHÔNG QUAY TẠI HIỆN TRƯỜNG.
Agricultural, forestry and irrigation machines - Evaluation of machine vibration - Measurement on non-rotating parts in situ
Ban hành kèm theo Quyết định số /2001-QĐ-BNN-KHCN ngày 15 tháng01 năm 2001
1. Phạm vi áp dụng
1.1 Tiêu chuẩn này quy định điều kiện lắp đặt, vận hành thiết bị đo, hướng dẫn cách đo và đánh giá rung động của máy hoàn chỉnh (như máy bơm, quạt, tuốc bin khí, tuốc bin hơi nước v.v.) có công suất đến 50MW và tốc độ quay từ 120 đến 15000 min-1 (vòng/phút) bằng phương pháp đo trên các bộ phận không quay và trên các bộ phận không chuyển động lắc (chuyển động qua lại) tại hiện trường.
1.2 Tiêu chuẩn này đưa ra các chuẩn cứ đánh giá rung động cho mục đích giám sát, vận hành, thử nghiệm và nghiệm thu được biểu diễn thông qua độ lớn và sự thay đổi theo thời gian của các đại lượng đo rung động. Đo và đánh giá rung động theo các chuẩn cứ rung động nhằm đảm bảo vận hành máy dài hạn, tin cậy và an toàn, giảm thiểu các ảnh hưởng xấu đến các thiết bị liên quan.
1.3 Các chuẩn cứ đánh giá rung động chỉ liên quan đến rung động phát sinh bởi bản thân máy thử mà không tính đến các rung động truyền từ bên ngoài vào.
1.4 Tiêu chuẩn này không áp dụng cho máy nén khí trục vít, bơm và máy nén khí pít tông, bơm động cơ điện chìm, động cơ gió...
2. Tiêu chuẩn trích dẫn
ã ISO 10816 - 1: 1995 Rung cơ học - Đánh giá rung động của máy bằng cách đo trên các bộ phận không quay.
Phần 1: Hướng dẫn chung.
ã ISO 10816 - 3: 2000 Rung cơ học - Đánh giá rung động của máy bằng cách đo trên các bộ phận không quay.
Phần 3: Máy công nghiệp có công suất trên 15kW và vận tốc quay từ 120 đến 15000 min-1 tại hiện trường.
ã TCVN 6372: 1998 Rung cơ học của máy quay và máy chuyển động tịnh tiến - Yêu cầu cho thiết bị đo cường độ rung.
3. Thuật ngữ và định nghĩa
Trong tiêu chuẩn này áp dụng các thuật ngữ và định nghĩa sau:
3.1 Thiết bị đo
Hợp bộ bao gồm đầu đo, thiết bị điện tử khuyếch đại-hiệu chỉnh đáp tuyến tần số và chỉ thị giá trị đại lượng đo rung động dải tần rộng.
3.2 Đầu đo
Phần tử cảm biến, chuyển đổi năng lượng cơ học thành năng lượng điện. Ví dụ: chuyển đổi gia tốc, vận tốc hay độ chuyển dịch rung động thành tín hiệu điện tỷ lệ với tín hiệu đầu vào.
3.3 Đại lượng đo
Các đại lượng đo rung động bao gồm:
Độ chuyển dịch, biểu thị bằng m m;
Vận tốc rung, biểu thị bằng mm/s;
Gia tốc rung, biểu thị bằng m/s2.
Chú thích: Giá trị hiệu dụng của vận tốc rung thường được sử dụng khi đánh giá rung động dải tần rộng của máy quay, vì nó liên quan mật thiết với năng lượng rung động.
Các đại lượng đo khác như độ chuyển dịch, gia tốc rung với các giá trị "đỉnh" thay vì giá trị hiệu dụng cũng được xem xét sử dụng trong các trường hợp cụ thể.
3.4 Dải tần số đo
Dải tần số có độ rộng tương thích bao trùm phổ tần số rung động của máy thử.
3.5 Độ lớn rung động
Kết quả đo các đại lượng rung động (điều 3.3) bằng thiết bị đo phù hợp với điều 3.1 tại vị trí và hướng đo xác định, gọi tắt là độ rung động.
3.6 Chỉ số rung động khắc nghiệt
Độ rung động lớn nhất dải tần rộng đọc được từ các vị trí đo khác nhau theo hai hay ba hướng tại giá đỡ máy và điều kiện đo nhất định.
3.7 Vị trí đo
Vị trí đặt đầu đo có phương và hướng xác định trên gối ổ lăn, trụ đỡ ổ lăn, hay các phần tử kết cấu khác, đảm bảo phản ánh trung thực lực động học và mô tả toàn dải rung động của máy.
3.8 Thử nghiệm tại hiện trường
Phép thử nghiệm được tiến hành tại nơi lắp đặt và làm việc của máy.
3.9 Chiều cao tâm trục
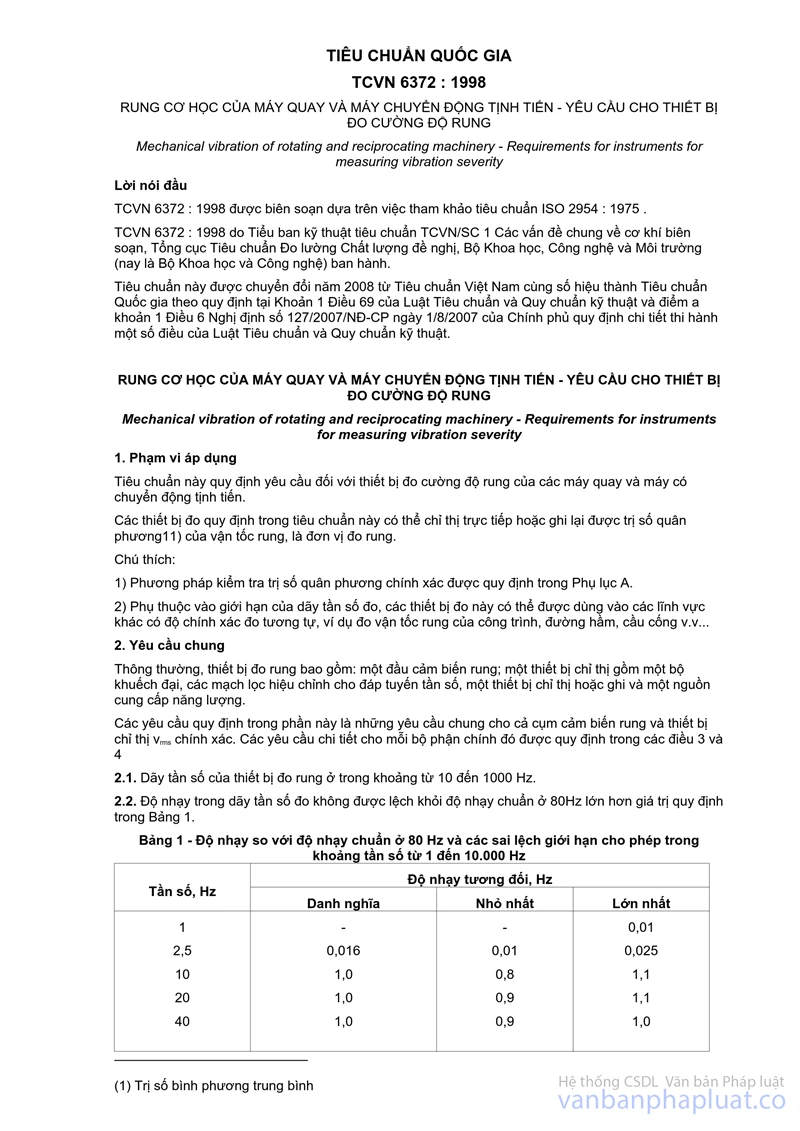
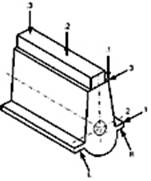
Chiều cao tâm trục H của máy là khoảng cách đo được giữa tâm trục động lực và mặt phẳng đế của máy đối với sản phẩm hoàn chỉnh (Hình 1).
3.10 Cảnh báo
Hiệu lệnh được đưa ra khi "chỉ số rung động khắc nghiệt" đạt tới giá trị xác định hoặc xuất hiện sự thay đổi đủ lớn, tại đó cần thiết có hành động cứu chữa.
3.11 Ngắt an toàn
Hành động tức thời can thiệp vào hệ điều hành máy nhằm làm giảm rung động hay dừng máy khi "chỉ số rung động khắc nghiệt" của máy đạt giá trị mà vượt qua nó nếu tiếp tục vận hành máy sẽ có thể gây sự cố hỏng hóc.
4. Phân loại máy
Trong tiêu chuẩn này (xem Phụ lục A), "rung động khắc nghiệt" được phân loại theo:
Kiểu máy;
Cỡ công suất hay chiều cao tâm trục;
Độ linh hoạt của hệ thống giá đỡ.
4.1 Phân loại theo kiểu máy, cỡ công suất hay chiều cao tâm trục
Năm nhóm máy khác nhau có các yêu cầu khác biệt đáng kể trong thiết kế về kiểu, kết cấu giá đỡ và gối đỡ ổ trượt, chiều cao H của tâm trục .v.v. trình bày trong Bảng 1 có thể có vị trí trục thẳng đứng, nằm ngang hay nằm nghiêng và được lắp đặt trên giá đỡ đàn hồi hay cứng vững.
Bảng 1 - Phân loại máy theo kiểu máy, cỡ công suất hay chiều cao tâm trục
Nhóm máy | Mô tả | Đặc điểm |
Nhóm 1 | Động cơ điện công suất đến và bằng 15kW có chiều cao tâm trục nhỏ hơn 160mm. | Máy hoạt động hoàn chỉnh ở chế độ vận hành danh định tổ hợp từ động cơ và máy công tác riêng rẽ. |
Nhóm 2 | Máy có công suất từ trên 15kW đến và bằng 300kW, động cơ điện có chiều cao tâm trục H lớn hơn hoặc bằng 160mm và nhỏ hơn 315mm. | Các máy này có ổ lăn và vận tốc làm việc trên 600 min-1. |
Nhóm 3 | Máy có công suất lớn hơn 300kW, máy điện có chiều cao tâm trục H không nhỏ hơn 315mm. | Các máy này thông thường có ổ trượt. Dải tốc độ làm việc tương đối rộng, từ 120 đến 15000 min-1. |
Nhóm 4 | Máy bơm nhiều tầng với máy động lực riêng rẽ (li tâm, hỗn lưu, hướng trục) công suất trên 15kW. | Máy nhóm này có thể có ổ trượt hoặc ổ lăn. |
Nhóm 5 | Máy bơm nhiều tầng tổ hợp với máy động lực (li tâm, hỗn lưu, hướng trục) công suất trên 15kW. | Máy nhóm này hầu hết có ổ trượt hoặc ổ lăn. |
Chú thích: Chiều cao tâm trục của máy không có chân đế hoặc máy có chân đế nâng cao và của máy đứng sẽ được xác định như là chiều cao tâm trục của máy trong cùng một khung đỡ chính, theo kiểu lắp đặt chân đế nằm ngang. Khi không biết trước khung đỡ, sẽ coi bán kính của máy là chiều cao tâm trục.
4.2 Phân loại theo độ linh hoạt của giá đỡ
Độ linh hoạt của hệ thống giá đỡ theo một hướng xác định được chia thành hai lớp sau:
Giá đỡ cứng vững;
Giá đỡ mềm (đàn hồi).
Các lớp giá đỡ trên được xác định tuỳ thuộc mối liên quan giữa máy và độ linh hoạt của nền đỡ.
4.2.1 Nếu tần số tự nhiên thấp nhất của liên hợp máy và hệ thống giá đỡ theo một hướng đo xác định cao hơn ít nhất 25% so với tần số kích thích cơ bản (thường là tần số quay trục động cơ) thì hệ thống giá đỡ được xem là cứng vững theo hướng đó. Tất cả các hệ thống giá đỡ khác được xem là đàn hồi.
Chú thích: Động cơ điện có công suất vừa và lớn thường có tốc độ quay thấp và giá đỡ cứng vững.
Máy phát tuốc bin, máy nén khí trên 10MW và các tổ máy đứng thường có giá đỡ đàn hồi.
4.2.2 Trong một số trường hợp , tổ hợp giá đỡ có thể "cứng vững" theo một hướng xác định và "đàn hồi" theo một hướng khác. Rung động được đánh giá theo cách phân loại giá đỡ phù hợp với hướng đo rung động. Ví dụ: tần số tự nhiên thấp nhất theo phương thẳng đứng có thể cao hơn tần số kích thích cơ bản, trong khi tần số tự nhiên theo phương nằm ngang lại thấp hơn đáng kể. Hệ thống như vậy có thể "cứng vững" trong mặt phẳng thẳng đứng và "đàn hồi" trong mặt phẳng nằm ngang.
Chú thích: Cho phép xác định bằng thực nghiệm lớp của hệ thống giá đỡ máy nếu chưa được tính toán và xác định trước từ bản vẽ (điều 4.2.1).
5. Quy trình đo thử và điều kiện vận hành
5.1 Yêu cầu chung
5.1.1 Thiết bị đo phải có tính năng kỹ thuật phù hợp về độ lớn, tần số, chế độ đo và độ dài cáp v.v. để đo được giá trị hiệu dụng đối với các tần số rung động dải rộng, đáp ứng phẳng (đồng đều) trên toàn dải tần số ít nhất từ 10Hz đến 1000Hz, có chứng chỉ hiệu chuẩn trong thời gian hiệu lực (TCVN 6372: 1998).
5.1.2 Tránh tác động bất lợi của môi trường lên thiết bị đo như:
Sự thay đổi nhiệt độ;
Trường điện từ;
Trường âm;
Sự thay đổi của nguồn động lực;
Chiều dài của cáp đo nối với đầu đo;
Hướng đặt đầu đo.
5.1.3 Chọn vị trí đo trên bộ phận hở của máy để việc tiếp cận được dễ dàng. Điểm đo (vị trí đặt đầu đo) phải phản ánh trung thực rung động của ổ lăn, tránh mọi sự cộng hưởng hay khuyếch đại cục bộ. Vị trí và hướng đo rung động phải có độ nhạy tương thích với lực rung động của máy.
Chú thích: Đối với máy có tốc độ quay nhỏ hơn hoặc bằng 600 min-1 giới hạn dưới của dải tần số đáp ứng cân bằng phải không lớn hơn 2Hz.
Cho mục đích chuẩn đoán, thiết bị đo phải có tần số giới hạn trên lớn hơn 1000Hz.
5.1.4 Tiến hành đo định kỳ rung động của máy bằng các thiết bị đo cầm tay hoặc cố định để phát hiện sự thay đổi mất cân bằng, thay đổi tính năng ổ trượt, hay các xê dịch khỏi vị trí căn chỉnh v.v. Đối với các đối tượng quan trọng có thể sử dụng máy tính để phân tích và cảnh báo tình trạng hoạt động kém của máy.
5.1.5 Vận hành và điều chỉnh, kiểm tra để chắc chắn đối tượng thử làm việc ổn định ở nhiệt độ chuẩn theo quy định của nhà chế tạo hay ở chế độ dự kiến theo các phương pháp thử riêng biệt.
5.2 Quy trình đo
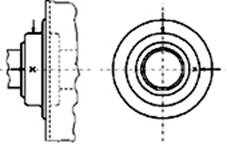
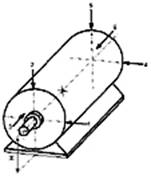
5.2.1 Chọn hai vị trí đo hướng tâm trực giao trên mỗi nắp ổ lăn hay trụ đỡ (Hình 1, 2, 3, 4 hoặc 5). Cho phép đặt các đầu đo tại bất kỳ vị trí góc nào trên gối ổ lăn hay trụ đỡ ổ lăn. Đo thêm rung động theo chiều dọc trục nếu có yêu cầu riêng biệt (điều 6.1.3). Phải ghi chép đầy đủ các giá trị đo ứng với các vị trí và hướng đo.
Chú thích: Phương thẳng đứng và phương nằm ngang được chọn đo cho các máy lắp đặt ngang. Đối với máy lắp đặt đứng hay nằm nghiêng sẽ sử dụng một trong các vị trí đo có trị số rung động lớn nhất (thường nằm theo chiều của trục đàn hồi).
5.2.2 Sử dụng đầu đo đơn trên gối đỡ ổ lăn hay trụ đỡ ổ lăn thay cho các cặp đầu đo trực giao, nếu biết trước thông tin tương thích về độ rung động của máy. Phải thận trọng khi đánh giá rung động từ đầu đo đơn tại mặt phẳng đo vì đầu đo có thể không được định hướng đúng chiều để đưa ra trị số xấp xỉ hợp lý đối với giá trị cực đại trên mặt phẳng này.
5.2.3 Lắp đặt đầu đo vào vị trí đo theo qui định của nhà chế tạo, phương pháp thử hoặc yêu cầu riêng biệt nếu có. Bật máy, chờ khoảng 15 phút để thiết bị đo hoạt động ổn định. Chọn đặt chế độ đo, đại lượng và thang đo, dải tần số đo v.v theo yêu cầu đo thử.
5.2.4 Điều chỉnh tốc độ quay hay mức tải trên máy và tiến hành đo rung động ở tất cả các chế độ thử nghiệm hoặc điều kiện máy dự kiến làm việc dài hạn. Tiến hành đo độ chuyển dịch hoặc vận tốc rung động hay tổ hợp cả hai đại lượng này tuỳ thuộc vào chuẩn cứ rung động được áp dụng. Ghi chép đầy đủ các giá trị đại lượng đo ứng với các vị trí đo, hướng đo và chế độ đo thử. Giá trị đo lớn nhất từ các điều kiện trên sẽ được xem là "chỉ số rung động khắc nghiệt".
Hình 1. Các điểm đo đối với máy nằm ngang có bệ đỡ ổ
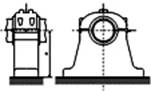
H×nh 2. C¸c ®iÓm ®o ®èi víi m¸y n»m ngang cã gèi ®ì æ l¨n
Hình 3. Các điểm đo đối với động cơ điện công suất bé
Hình 4. Các điểm đo đối với động cơ nằm ngang kiểu pit tông
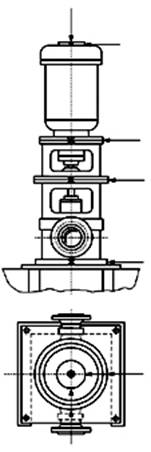
Hình 5. Các điểm đo đối với máy lắp đặt đứng
5.2.5 Nếu rung động đo được lớn hơn chuẩn cứ chấp nhận (điều 6) và nghi ngờ có mức rung động nền vượt trội, phải xác định mức độ ảnh hưởng từ bên ngoài bằng các phép đo tiến hành khi không vận hành máy thử. Nếu rung động đo được khi máy thử không vận hành lớn hơn 25% giá trị đo khi máy thử vận hành, phải hiệu chỉnh kết quả đo để loại trừ ảnh hưởng của rung động nền.
Chú thích: Cho phép loại bỏ rung động nền bằng cách loại trừ nguồn rung động từ bên ngoài hoặc loại bỏ thành phần này từ kết quả đo bằng phép phân tích phổ thích hợp.
6. Đánh giá kết quả đo
Trong tiêu chuẩn này đưa ra hai chuẩn cứ để đánh giá "chỉ số rung động khắc nghiệt" đối với các nhóm máy khác nhau. Trong khi chuẩn cứ thứ nhất xem xét độ rung động dải tần rộng đo được thì chuẩn cứ thứ hai chỉ xem xét sự thay đổi độ lớn mà không quan tâm đến chiều tăng giảm của nó (tham khảo Phụ lục B).
6.1 Chuẩn cứ I: Độ rung động
Chuẩn cứ I liên quan đến việc xác định các vùng giới hạn độ rung động (lực động) chịu được trên ổ lăn và mức độ rung động cho phép truyền về môi trường qua kết cấu giá và nền đỡ. Độ rung động lớn nhất đo được tại mỗi ổ lăn hay giá đỡ được đánh giá theo vùng ước lượng ứng với lớp giá đỡ nhất định. Các vùng ước lượng này được thiết lập từ kinh nghiệm quốc tế.
6.1.1 Giới hạn rung động
Các vùng ước lượng dưới đây (xem Phụ lục A) được xác định nhằm đánh giá chất lượng về rung động đối với một máy cụ thể và đưa ra các hướng dẫn hành động nếu không có các quy định riêng biệt.
Vùng A: Vùng rung động của máy mới sau khi được cấp phép sử dụng;
Vùng B: Vùng rung động của máy được phép làm việc dài hạn;
Vùng C: Vùng rung động của máy không thoả mãn điều kiện vận hành dài hạn. Tuy nhiên, có thể vận hành máy trong khoảng thời gian nhất định ở tình trạng này cho đến khi có điều kiện tiến hành biện pháp khắc phục;
Vùng D: Các giá trị rung động trong vùng này được xem như đủ "khắc nghiệt" để làm hỏng máy.
Chú thích: Trị số gán cho các vùng bao, không phải là quy định về đặc trưng kỹ thuật. Cho phép khách hàng và nhà cung cấp thoả thuận về giới hạn rung động (cao hơn hay thấp hơn) đối với loại máy cụ thể, nếu có yêu cầu riêng biệt.
6.1.2 Giới hạn vùng bao ước lượng
Trị số giới hạn vùng bao cho trong các Bảng A.1, A.2, A.3, A.4 và A.5 dựa trên các giá trị vận tốc rung và độ chuyển dịch dải rộng cực đại đo được từ hai đầu đo định hướng trực giao xuyên tâm. Chọn giá trị đo lớn nhất trong mỗi mặt phẳng đo khi sử dụng các Bảng này.
Chọn các giá trị đo vận tốc rung và độ chuyển dịch cực đại so sánh với các giá trị tương ứng trong Bảng A.1, A.2, A.3, A.4 hoặc A.5, vùng "khắc nghiệt" an toàn nhất sẽ được áp dụng.
6.1.3 Rung động dọc trục
Trong thực tiễn, ít áp dụng đo rung động dọc trục đối với các ổ lăn chịu lực hướng tâm trong quá trình giám sát vận hành liên tục. Đo rung động dọc trục trước tiên được sử dụng cho mục đích chuẩn đoán hay điều tra định kì vì một số sự cố dễ được phát hiện từ rung động dọc trục. Hiện tại, chuẩn cứ rung động dọc trục cá biệt chỉ áp dụng trong trường hợp có lực dọc trục tác động lên ổ lăn, ở đó rung động tương quan với xung lực dọc trục có thể làm hỏng bề mặt đỡ tải theo chiều dọc trục. Các chuẩn cứ trong bảng A.1, A.2, A.3, A.4 và A.5 áp dụng cho rung động hướng tâm trên tất cả các loại ổ lăn và rung động dọc trục trên ổ lăn chịu lực dọc trục.
6.1.4 Rung động của bơm
Các chuẩn cứ đánh giá rung động trong Bảng A.4 và A.5 áp dụng cho bơm vận hành ở chế độ lưu lượng danh định. Các trị số rung động cao có thể xuất hiện ở các điều kiện vận hành khác chế độ danh định do sự thay đổi tổn thất trong dòng chảy của hệ thống. Phải tuân thủ quy định của nhà chế tạo đối với chế độ vận hành khác với chế độ danh định để tránh hỏng hóc hoặc thúc đẩy lão hoá bơm trong thời kì khai thác sử dụng. Các trị số rung động cảnh báo và ngắt an toàn đều được điều chỉnh trên cơ sở kinh nghiệm, nếu áp dụng.
Chú thích: Do có kết cấu phù hợp, một số bơm đặc biệt có thể có trị số rung động cho phép cao hơn các trị số trong bảng A.4 và A.5.
Khi lắp đặt bơm phải đặc biệt chú ý để tránh cộng hưởng trong hệ thống đường ống và nền đối với tần số kích thích cơ bản (ví dụ: một hoặc hai lần tần số làm việc hoặc tần số cắt của bánh quay), vì tần số cộng hưởng có thể gây nên các rung động quá mức.
6.2 Chuẩn cứ II: Sự thay đổi độ rung động
6.2.1 Chuẩn cứ II đưa ra đánh giá về sự thay đổi độ rung động dải tần rộng, xuất hiện ở điều kiện vận hành trạng thái xác lập so với giá trị chuẩn được thiết lập trước đó. Sự xuất hiện các thay đổi đáng kể về độ rung động dải tần rộng, đòi hỏi một số đánh giá mà vùng C của chuẩn cứ I không đáp ứng được. Những thay đổi như vậy có thể xảy ra đột ngột hoặc tăng dần theo thời gian, qua đó có thể chỉ ra kịp thời trước khi xảy ra sự cố hỏng hóc hay một số biểu hiện không bình thường khác.
Chú thích: Điều kiện vận hành ở trạng thái xác lập có thể bao gồm các thay đổi nhỏ về điều kiện vận hành hay công suất máy.
6.2.2 Khi áp dụng chuẩn cứ II, các phép đo rung động đem so sánh phải được đọc tại cùng vị trí đo (đầu đo), cùng hướng và cùng một điều kiện vận hành. Các thay đổi rõ rệt về độ rung động (không quan tâm đến giá trị rung động tuyệt đối) cần được nghiên cứu để tránh các tình huống nguy hiểm. Khi độ rung động tăng hoặc giảm vượt quá 25% giá trị trên của vùng B (xác định trong Bảng A.1, A.2, A.3, A.4 và A.5), các thay đổi cần được quan tâm, đặc biệt nếu chúng xuất hiện bất thường. Khi đó, cần tiến hành nghiên cứu, chuẩn đoán để phát hiện nguyên nhân của sự thay đổi và xác định các hành động thích hợp tiếp theo.
Chú thích: Trị số 25% được đưa ra như một gợi ý về sự thay đổi đáng kể của độ rung động, song cũng có thể sử dụng các giá trị khác dựa trên kinh nghiệm đối với các loại máy đặc biệt. Ví dụ: có thể cho phép các thay đổi lớn hơn đối với một số kiểu bơm.
6.3 Giới hạn vận hành
Trong thực tiễn, cần thiết lập các giới hạn rung động cho chế độ vận hành dài hạn. Các giới hạn này có dạng cảnh báo và ngắt an toàn. Các giới hạn vận hành khác nhau, phản ánh khác nhau lên tải động và sự cứng vững của giá đỡ máy, cần được xác định đối với các vị trí đo và hướng đo khác nhau.
6.3.1 Đặt giá trị cảnh báo
Có thể thay đổi theo nhu cầu, tăng hoặc giảm giá trị cảnh báo đối với các máy khác nhau. Các trị số được chọn đặt, nhìn chung tuỳ thuộc giá trị đường cơ sở và được xác định theo kinh nghiệm đối với vị trí hay hướng đo cho loại máy riêng biệt.
Chú thích: Trị số cảnh báo được khuyến cáo chọn đặt 25% cao hơn đường cơ sở của giá trị giới hạn trên đối với vùng B. Nếu đường cơ sở thấp, trị số cảnh báo có thể đặt thấp hơn vùng C.
Đối với máy mới chưa có đường cơ sở, chọn đặt chế độ cảnh báo ban đầu trên cơ sở kinh nghiệm từ các máy tương tự hoặc liên quan, phù hợp với các giá trị chấp nhận đã thoả thuận. Sau một thời gian vận hành, giá trị "đường cơ sở trạng thái xác lập" cần được thiết lập và điều chỉnh lại theo giá trị cảnh báo tương ứng.
6.3.2 Đặt giá trị ngắt an toàn
Giá trị ngắt an toàn thường phụ thuộc vào mức độ tích hợp cơ khí của máy và phụ thuộc vào mỗi đặc điểm thiết kế riêng biệt đưa vào để máy có thể chịu đựng được các lực động bất thường. Các trị số ngắt an toàn được áp dụng như nhau cho tất cả các máy có thiết kế giống nhau và không liên quan đến giá trị đường cơ sở trạng thái xác lập dùng để đặt cảnh báo.
Nhìn chung, các giá trị cảnh báo có thể khác nhau đối với các máy có thiết kế khác nhau, do vậy không thể đưa ra chỉ dẫn cụ thể về các giá trị ngắt an toàn tuyệt đối. Thông thường, giá trị ngắt an toàn nằm trong vùng C và D, song các giá trị ngắt an toàn được khuyến cáo không vượt quá 1,25 lần giới hạn trên của vùng C.
6.4 Quy trình/chuẩn cứ bổ sung
Các phép đo và ước lượng rung động máy trong tiêu chuẩn này có thể được bổ sung bởi các phép đo rung động của trục khi có nhu cầu và sử dụng các chuẩn cứ tương thích. Cần thiết phải phân biệt rằng không có mối quan hệ đơn giản giữa rung động gối đỡ ổ lăn với rung động của trục hoặc ngược lại. Sự khác biệt giữa các phép đo rung động tuyệt đối của trục và các phép đo rung động tương đối của trục liên quan đến rung động gối đỡ ổ lăn có thể khác nhau do sự khác biệt về góc pha. Khi áp dụng các chuẩn cứ trong tiêu chuẩn này và từ các tiêu chuẩn thích hợp khác để đánh giá độ rung động của máy phải tiến hành đo độc lập rung động của trục và gối đỡ ổ lăn. Nếu áp dụng các chuẩn cứ khác nhau sẽ dẫn đến các kết quả đánh giá khác nhau về "rung động khắc nghiệt". Khi đó vùng có "giới hạn khắc nghiệt" an toàn hơn sẽ được xem xét áp dụng.
6.5 Đánh giá trên cơ sở thông tin vectơ rung động
Trong tiêu chuẩn này chỉ xem xét đánh giá rung động dải tần rộng mà không xét tới các thành phần tần số hay pha. Do vậy, trong nhiều trường hợp sẽ phù hợp với phép thử nghiệm nghiệm thu và cho mục đích giám sát vận hành. Tuy nhiên, cho mục đích giám sát điều kiện vận hành dài hạn, sử dụng thông tin vectơ rung động là đặc biệt bổ ích để phát hiện và xác định các thay đổi trạng thái động học của máy. Không thể phát hiện được các thay đổi này nếu chỉ sử dụng các phép đo rung động dải tần rộng.
Chú thích: Tần số và pha liên quan đến thông tin rung động ngày càng được sử dụng rộng rãi cho mục đích giám sát và chuẩn đoán. Tuy nhiên, đặc tính kĩ thuật của chuẩn cứ trên không phải là đối tượng của tiêu chuẩn này (tham khảo Phụ lục B).
7. Báo cáo kết quả
Biên bản thử nghiệm phải chứa các thông tin sau (tham khảo Phụ lục C):
Tên và địa chỉ của người/ tổ chức thực hiện đo thử nghiệm;
Số nhận dạng của biên bản thử nghiệm;
Tên và địa chỉ của người/ tổ chức yêu cầu thử nghiệm;
Điều kiện thử nghiệm như: Thời gian, địa điểm, môi trường thử nghiệm, phương pháp thử nghiệm, sơ đồ bố trí đầu đo, báo cáo các hạng mục đo thử nghiệm v.v.
Công bố số liệu đo phản ánh tình trạng của máy thử;
Kết luận về sự phù hợp của mức độ rung động xác định được với các yêu cầu của tiêu chuẩn này./.
Phụ lục A
(Quy định)
Giới hạn vùng bao ước lượng
Thực tế cho thấy vận tốc rung phản ánh khá đầy đủ các giá trị vùng bao rung động của nhiều kiểu máy với tốc độ quay khác nhau. Bởi vậy, đại lượng đánh giá cơ bản được chọn là giá trị hiệu dụng của vận tốc rung dải tần rộng.
Chú thích: Trong nhiều trường hợp, người ta chấp nhận đo rung động bằng các thiết bị đo có chia độ để đọc giá trị đỉnh thay vì giá trị rung động hiệu dụng.
Nếu hình dáng sóng rung động về cơ bản là sóng sin, quan hệ đơn giản tồn tại giữa giá trị đỉnh và giá trị hiệu dụng. Các vùng bao trong các bảng có thể được biểu diễn bởi các giá trị "từ không đến đỉnh" bằng cách nhân với hệ số hoặc bởi các giá trị "đỉnh đến đỉnh" bằng cách nhân với hệ số 2. Ví dụ: chia các giá trị rung động "từ không đến đỉnh" đo được cho, và nhận được chuẩn cứ hiệu dụng trong các Bảng A.1, A.2, A.3, A.4 và A.5.
Đối với nhiều máy, rung động vượt trội thường xuất hiện tại tần số trục quay động cơ. Còn máy bơm - đôi khi tại tần số cắt của cánh bơm. Khi đo giá trị rung động "đỉnh" thay vì các giá trị hiệu dụng, có thể thiết lập được các Bảng tương đương A.1, A.2, A.3, A.4 và A.5. Nhân trị số vùng bao trong các bảng đã cho với hệ số để tạo ra các bảng tương đương để đánh giá rung động khắc nghiệt "đỉnh" đối với trường hợp chỉ có một tần số.
Như đã biết, nếu chỉ xem xét giá trị vận tốc rung riêng rẽ mà không quan tâm đến tần số có thể dẫn đến độ chuyển dịch lớn không chấp nhận được. Ví dụ: trường hợp đối với máy có tốc độ quay thấp khi thành phần rung động chủ đạo là một lần trên một vòng. Tương tự, chuẩn số vận tốc không đổi đối với máy có tốc độ quay cao, hoặc có năng lượng rung động đủ lớn trong dải tần số cao có thể dẫn đến trị số gia tốc cao. Một cách lý tưởng, chuẩn cứ đánh giá chấp nhận cần phải dựa trên độ chuyển dịch, vận tốc và gia tốc rung động tuỳ thuộc vào dải tốc độ vận hành và kiểu máy. Tuy nhiên, hiện nay các giá trị vùng bao rung động chỉ được đưa ra dưới dạng vận tốc và độ chuyển dịch, trình bày trong Bảng A.1, A.2, A.3, A.4 và A.5 cho năm nhóm máy tương ứng (ISO 10816 - 1: 1995 và ISO 10816 - 3: 2000).
Các giới hạn áp dụng cho giá trị hiệu dụng dải tần rộng đối với vận tốc rung động và độ chuyển dịch ở dải tần số là từ 10Hz đến 1000Hz và đối với máy có tốc độ thấp hơn 600 min-1 là từ 2Hz đến 1000Hz. Trong hầu hết các trường hợp, chỉ cần đo mỗi vận tốc rung động là đủ. Nếu phổ rung động được xem xét chứa các thành phần tần số thấp, khi đánh giá cần phải dựa trên các phép đo dải tần rộng đối với vận tốc rung động và độ chuyển dịch.
Máy thuộc năm nhóm trên có thể được lắp đặt trên giá đỡ cứng vững hay giá đỡ đàn hồi (hướng dẫn phân loại giá đỡ trình bày trong điều 4). Giá trị và giới hạn bốn vùng ước lượng khác nhau cho trong các Bảng A.1, A.2, A.3, A.4 và A.5.
Bảng A.1 - Phân vùng ước lượng rung động khắc nghiệt đối với máy nhóm 1:
Tổ hợp động cơ - máy công tác có công suất đến 15kW, máy điện với chiều cao
tâm trục H nhỏ hơn 160mm
Vùng bao | Vận tốc rung động (hiệu dụng), mm/s |
A | 0,28 |
0,45 | |
0,71 | |
B | 1,12 |
1,8 | |
C | 2,8 |
4,5 | |
D | 7,1 |
11,2 | |
18 | |
28 | |
45 |
Bảng A.2 - Phân vùng ước lượng rung động khắc nghiệt đối với máy nhóm 2:
Máy có công suất trên 15kW đến và bằng 300kW, máy điện có chiều cao
tâm trục 160mm < h=""><>
Lớp giá đỡ | Vùng bao | Độ chuyển dịch (hiệu dụng), m m | Vận tốc (hiệu dụng), mm/s |
Cứng vững | A/B B/C C/D | 22 45 71 | 1,4 2,8 4,5 |
Đàn hồi | A/B B/C C/D | 37 71 113 | 2,3 4,5 7,1 |
Bảng A.3 - Phân vùng ước lượng rung động khắc nghiệt đối với máy nhóm 3:
Máy có công suất trên 300kW đến 50MW; máy điện với
chiều cao tâm trục H lớn hơn 315mm
Lớp giá đỡ | Vùng bao | Độ chuyển dịch (hiệu dụng), m m | Vận tốc (hiệu dụng), mm/s |
Cứng vững | A/B B/C C/D | 29 57 90 | 2,3 4,5 7,1 |
Đàn hồi | A/B B/C C/D | 45 90 140 | 3,5 7,1 11,0 |
Bảng A.4 - Phân vùng ước lượng rung động khắc nghiệt đối với máy nhóm 4:
Bơm nhiều tầng và máy động lực riêng rẽ (ly tâm, hỗn lưu hay hướng trục)
công suất trên 15kW
Lớp giá đỡ | Vùng bao | Độ chuyển dịch (hiệu dụng), m m | Vận tốc (hiệu dụng), mm/s |
Cứng vững | A/B B/C C/D | 18 36 56 | 2,3 4,5 7,1 |
Đàn hồi | A/B B/C C/D | 28 56 90 | 3,5 7,1 11,0 |
Bảng A.5 - Phân vùng ước lượng rung động khắc nghiệt đối với máy nhóm 5:
Bơm nhiều tầng và máy động lực liên hợp (ly tâm, hỗn lưu hay hướng trục)
công suất trên 15kW
Lớp giá đỡ | Vùng bao | Độ chuyển dịch (hiệu dụng), m m | Vận tốc (hiệu dụng), mm/s |
Cứng vững | A/B B/C C/D | 11 22 36 | 1,4 2,8 4,5 |
Đàn hồi | A/B B/C C/D | 18 36 56 | 2,3 4,5 7,1 |
Chú thích:
Trị số cho trong các Bảng từ A.1 đến A.5 không những áp dụng cho các phép đo rung động hướng tâm trên ổ lăn, bệ đỡ ổ lăn hoặc gối đỡ ổ lăn mà cho cả rung động dọc trục trên các ổ lăn chịu lực ở điều kiện vận hành trạng thái xác lập với tốc độ quay danh định hay trong vùng cho trước. Không áp dụng khi máy làm việc ở chế độ quá tải nhất thời.
Có thể cho phép các trị số khác cao hơn đối với các máy đặc biệt hay giá đỡ và điều kiện vận hành đặc thù. Tất cả các trường hợp này là đối tượng thoả thuận giữa nhà chế tạo và khách hàng.
Hiện nay, trong thực tiễn thường không giám sát trị số gia tốc rung của các máy này.
Đối với bơm cánh cưỡng bức đặc biệt chống mắc cỏ rác... hay chế độ vận hành tương tự, thông thường có thể có độ rung động cao hơn (ví dụ đến 3mm/s đối với bơm một tầng)./.
Phụ lục B
(tham khảo)
PHÂN TÍCH SỰ THAY ĐỔI VECTƠ RUNG ĐỘNG
B.1 Mở đầu
Chuẩn cứ đánh giá được xác định thông qua trị số rung động dải tần rộng khi xuất hiện bất cứ sự thay đổi nào về rung động xung quanh các giá trị xác lập. Chuẩn cứ này có hạn chế, vì một số thay đổi chỉ có thể nhận dạng được bằng phân tích vectơ riêng rẽ các thành phần tần số. Sự phát triển của kĩ thuật trên cho các mục đích khác nhau ngoài các thành phần rung động đồng bộ cũng mới đang bắt đầu và chưa thể xem xét trong tiêu chuẩn này.
B.2 Khái quát chung
Tín hiệu rung động dải tần rộng xác lập đo được trên máy về bản chất là giá trị phức hợp và hợp thành từ các thành phần tần số khác nhau. Mỗi thành phần tần số trong đó được xác định bởi tần số, biên độ và pha liên quan đến một số dữ liệu đã biết trước. Thông thường các thiết bị giám sát rung động chỉ đo độ lớn của toàn dải tín hiệu phức hợp mà không nhận biết sự khác nhau của mỗi tần số thành phần. Tuy nhiên, thiết bị chuẩn đoán hiện đại có khả năng phân tích tín hiệu phức hợp như biên độ và nhận dạng pha của mỗi thành phần tần số. Thông tin này có ý nghĩa đặc biệt quan trọng đối với kĩ sư rung động, cho phép chuẩn đoán các nguyên nhân và các động thái rung động không bình thường.
Các thay đổi trong thành phần tần số riêng rẽ, có thể khá lớn, nhưng chưa được phản ánh đủ trong phép đo rung động dải tần rộng và do vậy chuẩn cứ dựa trên sự thay đổi độ rung động dải tần rộng đòi hỏi phải có các phép đo pha bổ sung.
B.3 Bản chất của sự thay đổi vectơ rung động
Hình B.1 là biểu đồ cực dùng để chỉ hình dáng vectơ về biên độ và pha của một trong các thành phần tần số của tín hiệu rung động phức hợp.
Vectơ mô phỏng điều kiện trạng thái xác lập, ví dụ: ở đó độ rung động hiệu dụng là 3mm/s với góc pha 40O. Vectơ mô phỏng điều kiện rung động trạng thái xác lập sau một số thay đổi xuất hiện đối với máy, ví dụ: độ rung động hiệu dụng lúc này là 2,5mm/s với góc pha 180O. Mặc dù độ rung động hiệu dụng đã giảm 0,5mm/s (từ 3,0mm/s xuống 2,5mm/s), sự thay đổi rung động thực tế được thể hiện bởi vectơ có độ lớn hiệu dụng là 5,2 mm/s, lớn hơn mười lần so với chỉ số suy giảm độ rung động riêng rẽ.
B.4 Giám sát sự thay đổi vectơ rung động
Ví dụ đưa ra trong điều B.3 minh họa tầm quan trọng của việc nhận dạng sự thay đổi vectơ tín hiệu rung động. Tuy nhiên, cần thiết phải nhấn mạnh rằng tín hiệu rung động dải tần rộng, nhìn chung được hợp thành từ nhiều tần số thành phần riêng rẽ, mỗi tần số có thể ghi nhận sự thay đổi vectơ. Hơn nữa, sự thay đổi không thể chấp nhận được đối với một thành phần tần số riêng rẽ lại có thể nằm trong các giới hạn có thể chấp nhận đối với thành phần khác.
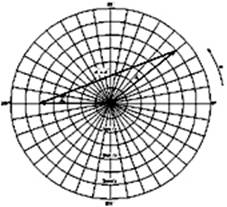
Hình B.1 - So sánh thay đổi vectơ và thay đổi độ lớn đối với thành phần tần số rời rạc
Vectơ trạng thái xác lập ban đầu = 3mm/s (giá trị hiệu dụng), a = 40O
Vectơ trạng thái xác lập sau thay đổi = 2,5mm/s(giá trị hiệu dụng), a = 180O
Thay đổi về độ rung động = 0,5mm/s (giá trị hiệu dụng)
Vectơ thay đổi = 5,2mm/s (giá trị hiệu dụng).
Do vậy, hiện tại không thể xác định điều kiện chuẩn cho sự thay đổi vectơ trong các thành phần tần số riêng rẽ tương thích với các luận điểm trong tiêu chuẩn này, mà trước tiên chỉ áp dụng cho mục đích giám sát vận hành chuẩn về rung động dải tần rộng bởi các chuyên gia "không rung động"./.
Phụ lục C
(tham khảo)
Tên Cơ sở thực hiện đo thử nghiệm
...............................................
Địa chỉ:..................................
Tel..................Fax..................
Mẫu Biên bản Đo thử nghiệm
Số..............
1. Khách hàng:
Tên: ........................................................................................
Địa chỉ: ...................................................................................
Điện thoại:................................ Fax: ......................................
2. Đối tượng đo thử nghiệm:
2.1. Tên/mã hiệu: ........................ Kiểu: ............... Nơi sản xuất: ................ Năm: ...............
2.2. Đặc trưng kỹ thuật chính:
Công suất định mức: ............................. kW/ kVA / kVar
Tốc độ quay định mức: ......................... min-1
Nhóm máy: ........................................
Kết cấu giá đỡ: ...................................
Điều kiện lắp đặt: ...............................
Các thông số khác: ............................................................................................
2.3. Tiêu chuẩn/Phương pháp áp dụng:..................................................
3. Chế độ đo thử nghiệm
trong nhà ă ngoài trời ă
4. Điều kiện đo thử nghiệm
4.1. Địa điểm :.....................................................................................
4.2. Thời gian : Từ ...................................đến......................................
4.3. Môi trường : Nhiệt độ........0C, Độ ẩm ..........%RH, áp suất khí quyển ...…......Pa
4.4. Điều kiện vận hành thử nghiệm:....................................................
4.5. Sơ đồ các vị trí đo
5. Phương tiện đo thử nghiệm
Số TT | Tên/Kí mã hiệu thiết bị | Dải đo | Sai số/ Độ KĐBĐ | Nơi chế tạo | Ngày hết hạn hiệu chuẩn | ||||||
Độ lớn, * | Tần số, Hz | ||||||||||
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
| |||||
|
|
|
|
|
|
|
|
|
|
|
|
Chú thích: - "*" đối với các đại lượng đo gia tốc, vận tốc rung động hay độ chuyển dịch, thứ nguyên tương ứng là m/s2, mm/s hoặc m m p-p.
6 .Kết quả đo thử nghiệm
6.1 Bảng số liệu đo thử nghiệm
Vị trí đo thử | Hướng đo | Kết quả đo rung động | Sai số / độ không đảm bảo đo, % | |||||
Dải tần số, Hz | Độ chuyển dịch, m m | Vận tốc, mm/s | Dải tần số, Hz | Độ chuyển dịch, m m | Vận tốc, mm/s | |||
1 | 1 |
|
|
|
|
|
| |
2 |
|
|
|
|
|
| ||
3 |
|
|
|
|
|
| ||
.... |
|
|
|
|
|
| ||
2 | 1 |
|
|
|
|
|
| |
2 |
|
|
|
|
|
| ||
3 |
|
|
|
|
|
| ||
.... |
|
|
|
|
|
| ||
. . . | . . . |
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
Chú thích: Chỉ rõ chế độ và dải tần số đo theo yêu cầu đo thử.
6.2 Ghi chú:.............................................................................................................
................................................................................................................................................
7. Người đo thử nghiệm và tính toán kết quả:.................
8. Kết luận/nhận xét: ..........................................................................................................
................................................................................................................................................