Nội dung toàn văn Tiêu chuẩn quốc gia TCVN 6627-16-2:2014 (IEC/TR 60034-16-2:1991) về Máy điện quay - Phần 16-2: Hệ thống kích từ máy điện đồng bộ - Mô hình để nghiên cứu hệ thống điện
TCVN 6627-16-2:2014
IEC/TR 60034-16-2:1991
MÁY ĐIỆN QUAY - PHẦN 16-2: HỆ THỐNG KÍCH TỪ MÁY ĐIỆN ĐỒNG BỘ - MÔ HÌNH ĐỂ NGHIÊN CỨU HỆ THỐNG ĐIỆN
Rotating electrical machines - Part 16: Excitation systems for synchronous machines - Chapter 2: Models for power system studies
Lời nói đầu
TCVN 6627-16-2:2014 hoàn toàn tương đương với IEC/TR 60034-16-2:1991;
TCVN 6627-16-2:2014 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC/E1 Máy điện và khí cụ điện biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Lời giới thiệu
Bộ Tiêu chuẩn Quốc gia TCVN 6627, Máy điện quay được xây dựng trên cơ sở chấp nhận hoàn toàn IEC 60034 do Ban kỹ thuật Tiêu chuẩn Quốc gia TCVN/TC/E1 Máy điện và khí cụ điện xây dựng. Bộ TCVN 6627 (IEC 60034) hiện đã có các tiêu chuẩn sau:
1) TCVN 6627-1:2014 (IEC 60034-1:2010), Máy điện quay - Phần 1: Thông số đặc trưng và tính năng
2) TCVN 6627-2-1:2010 (IEC 60034-2-1:2007), Máy điện quay - Phần 2: Phương pháp tiêu chuẩn để xác định tổn hao và hiệu suất bằng thử nghiệm (không kể máy điện dùng cho xe kéo)
3) TCVN 6627-2A:2001 (IEC 60034-2A:1974), Máy điện quay - Phần 2: Phương pháp thử nghiệm để xác định tổn hao và hiệu suất của máy điện quay (không kể máy điện dùng cho xe kéo). Đo tổn hao bằng phương pháp nhiệt lượng
4) TCVN 6627-3:2010 (IEC 60034-3:2007), Máy điện quay - Phần 3: Yêu cầu cụ thể đối với máy phát đồng bộ truyền động bằng tuabin hơi hoặc tuabin khí
5) TCVN 6627-5:2008 (IEC 60034-5:2000 and amendment 1:2006), Máy điện quay - Phần 5: Cấp bảo vệ bằng vỏ ngoài nhờ thiết kế tích hợp (Mã IP) - Phân loại
6) TCVN 6627-6:2011 (IEC 60034-6:1991), Máy điện quay - Phần 6: Phương pháp làm mát (Mã IC)
7) TCVN 6627-7:2008 (IEC 60034-7:2004), Máy điện quay - Phần 7: Phân loại các kiểu kết cấu, bố trí lắp đặt và vị trí hộp đầu nối (Mã IM)
8) TCVN 6627-8:2010 (IEC 60034-8:2007), Máy điện quay. Phần 8: Ghi nhãn đầu nối và chiều quay
9) TCVN 6627-9:2011 (IEC 60034-9:2007), Máy điện quay. Phần 9: Giới hạn mức ồn
10) TCVN 6627-11:2008 (IEC 60034-11:2004), Máy điện quay - Phần 11: Bảo vệ nhiệt
11) Máy điện quay - Phần 12: Đặc tính khởi động của động cơ cảm ứng lồng sóc ba pha một tốc độ
12) TCVN 6627-14:2008 (IEC 60034-14:2003 and amendment 1:2007), Máy điện quay - Phần 14: Rung cơ khí của một số máy điện có chiều cao tâm trục bằng 56 mm và lớn hơn - Đo, đánh giá và giới hạn độ khắc nghiệt rung
13) TCVN 6627-15:2011 (IEC 60034-15:2009), Máy điện quay - Phần 15: Mức chịu điện áp xung của cuộn dây stato định hình dùng cho máy điện xoay chiều
14) TCVN 6627-16-1:2014 (IEC 60034-16-1:2011), Máy điện quay - Phần 16-1: Hệ thống kích từ máy điện đồng bộ - Định nghĩa
15) TCVN 6627-16-2:2014 (IEC/TR 60034-16-2:1991), Máy điện quay - Phần 16-2: Hệ thống kích từ máy điện đồng bộ - Mô hình để nghiên cứu hệ thống điện
16) TCVN 6627-16-3:2014 (IEC 60034-16-3:1996), Máy điện quay - Phần 16-3: Hệ thống kích từ máy điện đồng bộ - Tính năng động học
17) TCVN 6627-18-1:2011 (IEC 60034-18-1:2010), Máy điện quay - Phần 18-1: Đánh giá chức năng của hệ thống cách điện - Hướng dẫn chung
18) TCVN 6627-18-21:2011 (IEC 60034-18-21:1992 with amendment 1:1994 and amendment 2:1996), Máy điện quay - Phần 18-21: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn kiểu quấn dây - Đánh giá về nhiệt và phân loại
19) TCVN 6627-18-31:2014 (IEC 60034-18-31:2012), Máy điện quay - Phần 18-31: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá về nhiệt và phân loại các hệ thống cách điện sử dụng trong máy điện quay
20) TCVN 6627-18-32:2014 (IEC 60034-18-32:2010), Máy điện quay - Phần 18-32: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá bằng độ bền nhiệt
21) TCVN 6627-18-33:2014 (IEC/TS 60034-18-33:2010), Máy điện quay - Phần 18-33: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá nhiều yếu tố bằng độ bền khi đồng thời chịu ứng suất nhiệt và điện
22) TCVN 6627-18-34:2014 (IEC 60034-18-34:2012), Máy điện quay - Phần 18-34: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá độ bền cơ nhiệt của hệ thống cách điện
23) TCVN 6627-26:2014 (IEC 60034-26:2006), Máy điện quay - Phần 26: Ảnh hưởng của điện áp mất cân bằng lên tính năng của động cơ cảm ứng lồng sóc ba pha
24) TCVN 6627-30:2011 (IEC 60034-30:2008), Máy điện quay - Phần 30: Cấp hiệu suất của động cơ cảm ứng lồng sóc ba pha một tốc độ (Mã IE)
25) TCVN 6627-31:2011 (IEC/TS 60034-31:2010), Máy điện quay - Phần 31: Lựa chọn động cơ hiệu suất năng lượng kể các các ứng dụng biến đổi tốc độ - Hướng dẫn áp dụng
MÁY ĐIỆN QUAY - PHẦN 16-2: HỆ THỐNG KÍCH TỪ MÁY ĐIỆN ĐỒNG BỘ - MÔ HÌNH ĐỂ NGHIÊN CỨU HỆ THỐNG ĐIỆN
Rotating electrical machines - Part 16: Excitation systems for synchronous machines - Chapter 2: Models for power system studies
1. Phạm vi áp dụng
Tiêu chuẩn này đưa ra các hướng dẫn lập mô hình và các mô hình thích hợp dùng cho các hệ thống kích từ sử dụng trong các nghiên cứu sự ổn định hệ thống điện và cách đặt tên để xác định các tham số và biến số được sử dụng.
Các thuật ngữ và định nghĩa được cho trong TCVN 6627-16-1 (IEC 60034-16-1).
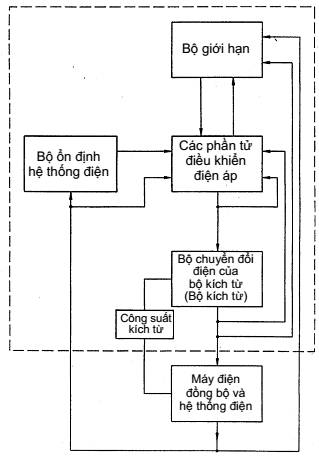
Hình 1 - Sơ đồ khối chung về chức năng của các hệ thống kích từ (nằm trong phạm vi hình nét đứt) dùng cho máy điện đồng bộ
2. Phân loại bộ kích từ - Sự thể hiện bằng hình vẽ và mô hình toán học dùng cho các nghiên cứu về sự ổn định
2.1. Bộ kích từ một chiều
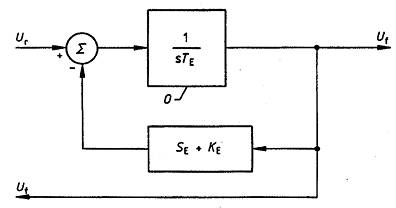
Mặc dù không được sử dụng nhiều trên các máy điện mới, bộ kích từ một chiều vẫn được nghiên cứu vì nhiều máy điện đồng bộ trong vận hành hiện nay được trang bị kiểu bộ kích từ này. Hình 2 đưa ra cách thể hiện bằng hình vẽ kiểu bộ kích từ có một cuộn kích từ được kích từ độc lập còn Hình 3 đưa ra mô hình tương ứng. Thuật ngữ KE được đưa vào mô hình để tính đến đặc tính của bộ kích từ có đặc trưng tự kích từ. Lưu ý rằng KE = 1 trong trường hợp bộ kích từ có kích từ độc lập.
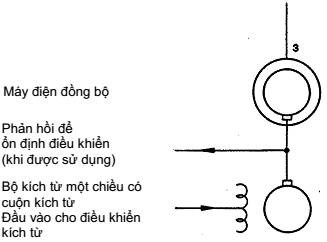
Hình 2 - Bộ kích từ một chiều có một cuộn kích từ được kích từ độc lập
Hình 3 - Mô hình ứng với Hình 2
Một số dạng điều khiển kích từ đang sử dụng gồm
- biến trở hoạt động kiểu điện cơ;
- biến trở hoạt động bằng động cơ;
- đóng và ngắn mạch định kỳ mạch kích từ song song;
- sử dụng các cuộn kích từ bổ sung, riêng rẽ cho việc giảm và tăng kích từ;
- sử dụng điện áp đầu ra của máy phát khuếch đại nối tiếp với cuộn kích từ cho việc giảm và tăng kích từ.
Lưu ý đến tỷ lệ phần trăm giảm và tầm quan trọng của các khối được trang bị bộ kích từ một chiều, mô hình đơn giản của Hình 3 cần chứng tỏ là phù hợp đối với các trường hợp này.
2.2. Bộ kích từ xoay chiều
Bộ kích từ xoay chiều sử dụng máy phát xoay chiều cùng với bộ chỉnh lưu tĩnh hoặc quay để tạo ra dòng điện kích từ cho máy điện đồng bộ. Bộ chỉnh lưu này có thể không hoặc có điều khiển. Trong trường hợp bộ chỉnh lưu không điều khiển thì việc điều khiển được thực hiện thông qua một hoặc nhiều cuộn kích từ của bộ kích từ xoay chiều.
Điều quan trọng là cần biết nguồn cung cấp dòng điện kích từ của bộ kích từ thông qua thiết bị điều khiển của nó để lập mô hình điều khiển. Nguồn có thể là một máy phát phụ hoặc nguồn áp tĩnh hoặc nguồn tĩnh hỗn hợp.
Hình 4 thể hiện bằng hình vẽ bộ kích từ xoay chiều với bộ chỉnh lưu tĩnh không điều khiển. Bộ chỉnh lưu tĩnh được nuôi bằng máy phát xoay chiều và cung cấp dòng một chiều cho cuộn kích từ của máy phát đồng bộ thông qua chổi than và vành trượt. Đấu nối cuộn kích từ quay của máy phát bộ kích từ với phần điều khiển kích từ cũng được thực hiện bằng chổi than và vành trượt.
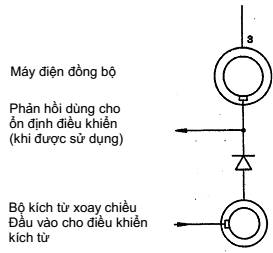
Hình 4 - Bộ kích từ xoay chiều có bộ chỉnh lưu tĩnh không điều khiển
Hình 5 thể hiện bằng hình vẽ bộ kích từ xoay chiều có bộ chỉnh lưu quay không điều khiển (bộ kích từ không chổi than) và bộ kích từ phụ bằng nam châm vĩnh cửu dùng để cấp nguồn cho thiết bị điều khiển kích từ. Bộ chỉnh lưu quay trên trục chung với máy phát đồng bộ và phần ứng quay dùng cho bộ kích từ xoay chiều. Đầu ra của bộ chỉnh lưu quay được nối trực tiếp với cuộn kích từ của máy điện đồng bộ, không cần qua vành trượt và chổi than.
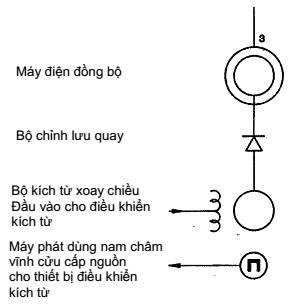
Hình 5 - Bộ kích từ xoay chiều có bộ chỉnh lưu quay không điều khiển (bộ kích từ không có chổi than)
Bộ kích từ xoay chiều có thể được mô hình hóa như thể hiện trên Hình 6, có tính đến hiệu ứng tải cả ở trạng thái ổn định và quá độ của bộ kích từ. (Trong một số trường hợp nhất định, có thể sử dụng mô hình chi tiết hơn để tính đến các hiệu ứng của tải quá độ).
Mô hình đơn giản được thể hiện trên Hình 7. Mặc dù chỉ sử dụng đường cong tải bão hòa để tính đến các hiệu ứng tải trạng thái ổn định nhưng có thể vẫn đủ đối với hầu hết các nghiên cứu. Việc sử dụng mô hình đơn giản cũng có thể được chỉ ra trong trường hợp chưa có sẵn các dữ liệu hoàn chỉnh.
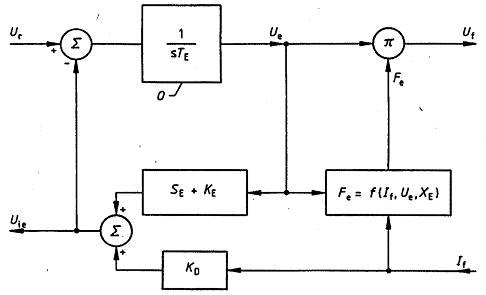
Hình 6 - Mô hình chi tiết của bộ kích từ xoay chiều
Hình 7 - Mô hình đơn giản của bộ kích từ xoay chiều
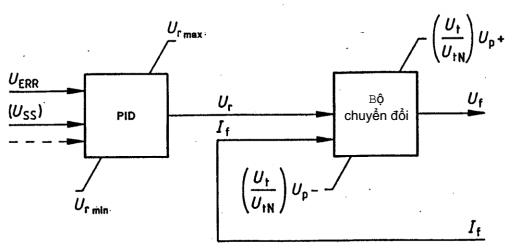
2.3. Bộ kích từ tĩnh nguồn áp
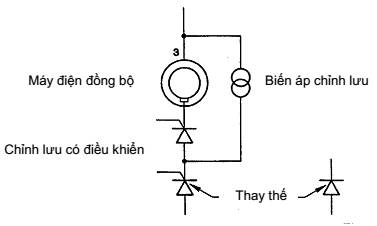
Bộ kích từ tĩnh nguồn áp sử dụng máy biến áp chỉnh lưu có thể được cấp nguồn từ máy phát phụ lắp trên cùng trục với máy điện đồng bộ, từ hệ thống thanh cái phụ không phụ thuộc vào điện áp máy phát chính hoặc từ điện áp đầu nối của máy điện đồng bộ. Việc cấp nguồn từ điện áp đầu nối của máy điện đồng bộ được gọi là hệ thống kích từ tĩnh song song và sự biến thiên điện áp của hệ thống này phải được tính đến đối với tính năng và việc lập mô hình. Hình 8 thể hiện bằng hình vẽ hệ thống này.
Có thể sử dụng cầu đối xứng thyristo hoặc cầu không đối xứng có một nửa nhánh cầu là thyristo và một nửa là điốt. Điều khiển góc mở thường được sử dụng để hạn chế giá trị điện áp âm sẵn có, đưa ra các giá trị tuyệt đối của hiệu hai giá trị Up+ và Up-. Kết cấu cầu không đối xứng không cho phép nghịch lưu và sẽ có giá trị Up- bằng “không”.
Trong các thiết bị thông dụng nhất, cầu chỉnh lưu có điều khiển sẽ chỉ cho phép dòng kích từ dương chạy qua. Nếu đầu nối của máy điện đồng bộ có nhiễu làm cho dòng điện kích từ cảm ứng âm chạy qua thì mô hình máy tính trên Hình 9 không còn giá trị nữa. Điện áp trên cuộn kích từ của máy điện đồng bộ sẽ không còn được xác định bởi lệnh điều khiển của bộ điều chỉnh mà được xác định từ các xem xét khác không thuộc phạm vi áp dụng của tiêu chuẩn này.
Thiết bị cho phép cả dòng điện kích từ dương và âm chạy qua sẽ chỉ được yêu cầu trong các trường hợp làm việc không bình thường. Mô hình máy tính trên Hình 9 sẽ áp dụng được ngay cả trong các điều kiện như vậy của hệ thống.
Hình 8 - Hệ thống kích từ tĩnh nguồn áp
Mô hình:
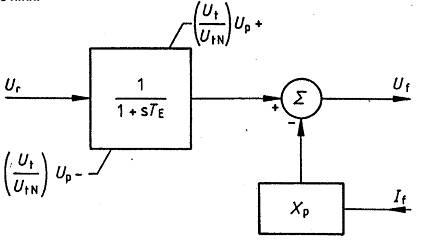

Hình 9 - Mô hình và ký hiệu hệ thống kích từ tĩnh nguồn áp
2.4. Bộ kích từ tĩnh nguồn hỗn hợp
Bộ kích từ tĩnh nguồn hỗn hợp là các máy biến áp chỉnh lưu được cấp nguồn từ cả nguồn dòng và nguồn áp (các đại lượng của máy điện đồng bộ). Có một số lượng lớn các phương án thiết kế. Trong tiêu chuẩn này sẽ mô tả ba phương án được sử dụng phổ biến nhất.
Ví dụ đầu tiên, Hình 10, minh họa khái niệm về sự bổ sung điện áp từ hai nguồn nối tiếp trên phía một chiều của bộ chỉnh lưu. Biến dòng có thiết kế mạch từ đặc biệt hoặc sử dụng các cuộn kháng riêng rẽ như thể hiện trên Hình 10, mô hình tương ứng được cho trên Hình 11.

Hình 10 - Bộ kích từ tĩnh nguồn hỗn hợp có bổ sung điện áp nối tiếp ở phía một chiều
Hình 11 - Mô hình ứng với Hình 10
Ví dụ thứ hai, Hình 12, minh họa khái niệm bổ sung dòng điện từ hai nguồn song song ở phía xoay chiều của bộ chỉnh lưu. Biến áp nguồn áp có thiết kế mạch từ đặc biệt hoặc sử dụng cuộn kháng riêng như thể hiện trên hình. Điều khiển được thực hiện bằng cách tách ra một phần của tổng dòng điện thông qua các bộ chỉnh lưu có điều khiển.
Một biến thể khác của thiết kế (không được minh họa trong tiêu chuẩn) sử dụng dây quấn riêng rẽ bên trong máy điện đối với các nguồn áp, có hoặc không có dòng điện đầu nối của máy điện như một nguồn thứ hai.
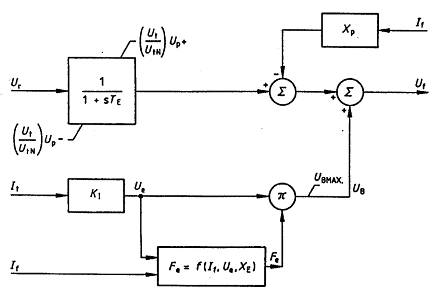
Mô hình máy tính, Hình 13, đủ tổng quát để cho phép chứa tất cả các tham số thiết kế của cả hai hệ thống này.
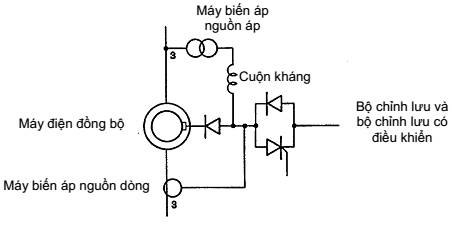
Hình 12 - Bộ kích từ tĩnh nguồn hỗn hợp có bổ sung dòng điện từ cả hai nguồn về phía xoay chiều
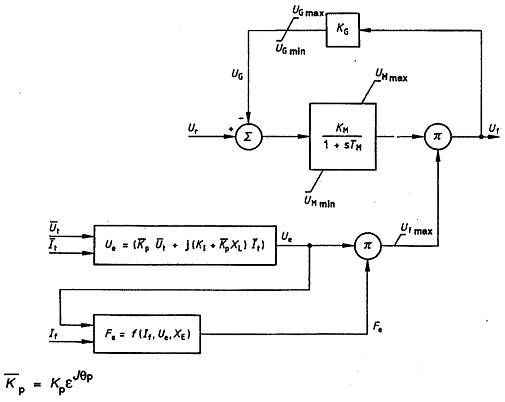
Hình 13 - Mô hình tổng quát của bộ kích từ tĩnh nguồn hỗn hợp
Một biến thể nữa của hệ thống cung cấp điều khiển đầu ra bộ kích từ bằng cách bão hòa máy biến áp nguồn dòng. Hệ thống này được minh họa trên Hình 14, và mô hình máy tính được thể hiện trên Hình 15.
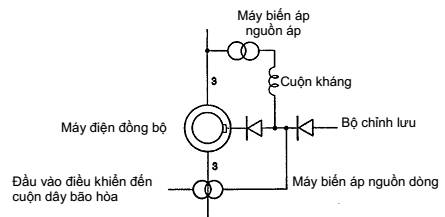
Hình 14 - Bộ kích từ tĩnh nguồn hỗn hợp với sự bổ sung dòng điện từ cả hai nguồn trên phía xoay chiều

Hình 15 - Mô hình ứng với Hình 14
Một số dạng bộ kích từ hỗn hợp không sử dụng các biến áp hai cuộn dây riêng rẽ dùng cho nguồn dòng và nguồn áp. Thay vào đó các thiết kế này sử dụng máy biến áp ba cuộn dây, việc kết hợp các nguồn được thực hiện kiểu từ. Quan hệ toán học và sơ đồ khối của Hình 13 và Hình 15 có thể áp dụng cho các hệ thống này.
2.5. Mô hình toán học đối với chức năng điều khiển
Phần khó khăn đáng kể cần thiết để chuẩn bị cho các nghiên cứu tính ổn định trên quy mô lớn là thu thập và đánh giá dữ liệu để mô tả toán học các hệ thống kích từ liên quan. Sử dụng các mô hình toán học đơn giản để giảm khó khăn này có thể bị hạn chế khi các nghiên cứu mở rộng quá góc dao động đầu tiên của roto. Việc xác định sự ổn định của các hệ thống điện nối liên kết hiện đại thường đòi hỏi mô phỏng liên tục trong nhiều giây và nhiều dao động qua lại. Do đó sự đơn giản hóa sẽ bị hạn chế ở một số trường hợp.
Các thiết bị của các nhà chế tạo khác nhau thường có chung các chức năng cơ bản của điều khiển kích từ mà có thể được mô tả toán học bằng điều khiển PID phổ biến. Điều này cho phép thể hiện các phần thiết yếu của điều khiển kích từ ở dạng được tiêu chuẩn hóa.
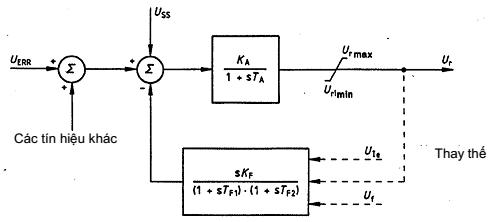
Trong điều khiển PID trên Hình 16, khối đầu tiên có các hằng số thời gian TC2, TB2 thể hiện hàm đạo hàm (D), các khối còn lại có hằng số thời gian TC1, TB1 và hệ số khuếch đại KR thể hiện hàm PI. Giới hạn đầu ra Urmax, Urmin, theo ảnh hưởng của chúng, là kiểu non-wind-up, tức là chúng sẽ không cho số hạng tích phân vượt ra khỏi các giới hạn này. Việc so sánh giữa wind-up và non-wind-up được nêu trong Phụ lục D. Cổng đóng vai trò như một bộ lựa chọn tín hiệu khi bộ hạn chế cần được thể hiện.
Các số hạng không áp dụng được hoặc không có yêu cầu trong ứng dụng đặc biệt của mô hình tiêu chuẩn này được đặt tương ứng là 1 hoặc 0. Tùy thuộc vào thuật giải, đôi khi cần cung cấp ít nhất là giá trị nhỏ nhất của hằng số thời gian chậm sau, được phối hợp với khoảng thời gian tính toán kỹ thuật số, nhằm tránh sự không ổn định về số của các tính toán.
Hàm tích phân tỷ lệ đôi khi có kết cấu như trên Hình 17 với hạn chế đầu ra non-wind-up được cung cấp bởi bộ khuếch đại tỷ lệ trong phần tử phản hồi. Hình 17 cũng đưa ra mối quan hệ đại số để thể hiện cấu trúc theo Hình 16. Khi giới hạn đầu ra non-wind-up cần được thể hiện, sử dụng cấu trúc của Hình 16 có thể cần thiết nhằm tránh các vấn đề trong tính toán do hệ số khuếch đại cao của bộ khuếch đại trong phản hồi.
Hình 18 thể hiện một trong các mô hình cơ bản được sử dụng thường xuyên và sớm nhất của kiểu PID, có chức năng tương tự với Hình 16 nhưng cung cấp trễ trong khối phản hồi thay vì hàm vượt trước theo hướng tiến. Mô hình này được yêu cầu như một tùy chọn vì không thể tương đương với cấu trúc của Hình 16.
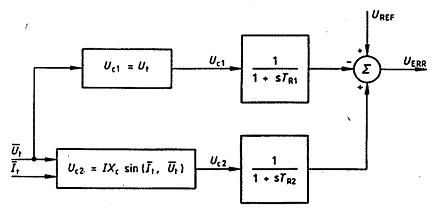
Việc lập mô hình cảm biến điện áp đầu nối máy phát là chung cho tất cả các bộ điều chỉnh điện áp. Hình 19 thể hiện cảm biến điện áp kết hợp với bù dòng điện tải ở phía xoay chiều. Trong trường hợp này, các biến số đầu vào (điện áp và dòng điện máy phát) được đưa vào dạng véctơ và tín hiệu tạo thành sẽ được chỉnh lưu. Bù dòng điện tải thường được sử dụng ở một trong các dạng sau:
- khi các khối là song song không có trở kháng giữa chúng thì bù dòng điện được sử dụng để tạo ra trở kháng ghép nối giả, sao cho các khối sẽ phân chia công suất phản kháng một cách phù hợp. Đối với trường hợp này, XC cần có giá trị dương.
- khi một khối duy nhất được nối thông qua một trở kháng đáng kể đến hệ thống, hoặc khi hai hoặc nhiều khối được nối thông qua các máy biến áp riêng rẽ, có thể sẽ tốt hơn nếu điều chỉnh điện áp tại điểm bên ngoài các đầu nối của máy điện. Ví dụ có thể mong muốn bù một phần trở kháng máy biến áp. Đối với các trường hợp này, RC và XC lấy giá trị âm.
Trong hầu hết các trường hợp bù dòng điện tải, thành phần RC là không đáng kể và chỉ cần có giá trị XC. Trong trường hợp này, giảm ảnh hưởng của dòng điện đến thành phần phản kháng là đủ, chức năng giảm này được gọi là bù dòng điện phản kháng. Ảnh hưởng của dòng điện phản kháng khi đó cũng có thể được bổ sung như một tín hiệu lọc một chiều cho tín hiệu điện áp đầu nối được lọc, theo Hình 20.
Khi không sử dụng bù, chỉ bộ lọc đối với điện áp đầu nối chỉnh lưu được giữ lại trên Hình 19 và Hình 20. Mặc dù việc lọc có thể phức tạp nhưng đối với mục đích lập mô hình, thường có thể giảm nó xuống thành hằng số thời gian như được thể hiện. Đối với nhiều hệ thống, hằng số thời gian này khá nhỏ và cần có biện pháp để đặt hằng số này về không.
Một số bộ bù có thể sử dụng công suất tác dụng và công suất phản kháng như các biến số bù. Các tín hiệu này có thể có lọc khác với các bộ lọc được sử dụng cho điện áp đầu nối. Hình 21 thể hiện bộ lọc kiểu này.
Điện áp đầu nối sau khi bổ sung thêm ảnh hưởng của bộ bù tải và việc lọc được so sánh với chuẩn thể hiện giá trị đặt của điện áp đầu nối mong muốn. Tín hiệu chuẩn của bộ điều chỉnh điện áp tương đương, UREF, được chọn để thỏa mãn các điều kiện làm việc ban đầu.
Khi sử dụng bù, cần lưu ý là có thể bổ sung thêm làm tắt dần dương và âm trong trường hợp có dao động công suất.
CHÚ THÍCH 1: · chỉ thị ưu tiên giữa các bộ hạn chế.
CHÚ THÍCH 2: Giá trị giới hạn dưới đôi khi được ký hiệu là LV.
CHÚ THÍCH 3: Giá trị giới hạn trên đôi khi được ký hiệu là HV.
Hình 16 - Bộ điều chỉnh PID phổ biến có bộ hạn chế - Cấu trúc và mô hình toán học
Tương đương với Hình 16:

Hình 17 - Bộ điều chỉnh PID thay thế - Cấu trúc và tính tương đương với Hình 16
Hình 18 - Bộ điều chỉnh vượt trước không có bộ hạn chế
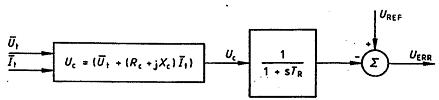
Hình 19 - Cảm biến điện áp đầu nối và bù dòng điện tải
Hình 20 - Cảm biến điện áp đầu nối và bù dòng điện phản kháng tại điểm ghép nối chuẩn
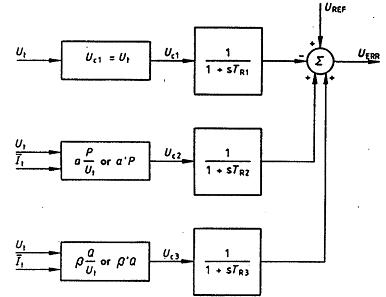
trong đó
a, a’, b, b’ là các số phức
P, Q là công suất tác dụng và phản kháng tại các đầu nối máy phát
Hình 21 - Cảm biến điện áp đầu nối và bù công suất tác dụng và phản kháng tại điểm ghép nối chuẩn
3. Thuật ngữ
3.1. Tham số
TE |
| Hằng số thời gian liên quan đến bộ kích từ quay xoay chiều và một chiều Hằng số thời gian liên quan đến cuộn dây bão hòa của bộ kích từ tĩnh Hằng số thời gian tương đương liên quan đến điều khiển cầu thyristo |
SE | Hàm bão hòa liên quan đến bộ kích từ quay xoay chiều và một chiều | |
KE | Hằng số liên quan đến trường tự kích từ của bộ kích từ quay xoay chiều và một chiều. Đối với các bộ kích từ kích từ riêng rẽ, KE = 1. | |
KM | Hệ số khuếch đại vượt trước của bộ điều chỉnh trường mạch vòng bên trong của bộ kích từ tĩnh hỗn hợp | |
KD | Hệ số khử từ là hàm của điện kháng bộ kích từ xoay chiều | |
XE | Hệ số mang tải của bộ chỉnh lưu, tỷ lệ với điện kháng chuyển mạch của nguồn áp, nguồn dòng hoặc nguồn áp và nguồn dòng kết hợp tương đương | |
TM | Hằng số thời gian tương đương của bộ điều chỉnh trường mạch vòng bên trong của bộ kích từ tĩnh hỗn hợp | |
Fe | Hệ số rơi chuyển mạch, xem Phụ lục B | |
Ki | Hằng số liên quan đến đầu vào mạch dòng điện | |
Kp | Hằng số liên quan đến đầu vào mạch điện thế | |
XL | Hệ số liên quan đến tính toán cuộn dây điện áp bên trong của máy phát, tỷ lệ với điện cảm rò stato của máy phát | |
Uf max | Điện áp đầu ra lớn nhất, ứng với mức bão hòa, của bộ kích từ hỗn hợp | |
| Đầu ra lớn nhất và nhỏ nhất của bộ điều chỉnh | |
UB max | Điện áp lớn nhất ứng với mức bão hòa của thành phần nguồn dòng của bộ kích từ hỗn hợp | |
| Điện áp đầu ra không tải lớn nhất và nhỏ nhất của bộ kích từ nguồn áp ở điện áp máy phát danh định | |
KG | Hệ số khuếch đại phản hồi của bộ điều chỉnh trường mạch vòng trong | |
| Các giới hạn phản hồi lớn nhất và nhỏ nhất của bộ điều chỉnh trường mạch vòng trong | |
TR, TR1, TR2, TR3 | Các hằng số thời gian liên quan đến bộ chuyển đổi điện áp đầu nối và bộ bù dòng điện tải | |
XP | Hệ số mang tải của bộ chỉnh lưu dùng cho bộ chuyển đổi nguồn áp | |
| Các hằng số hệ số khuếch đại liên quan đến bộ điều chỉnh điện áp | |
| Các hằng số thời gian liên quan đến bộ điều chỉnh điện áp | |
Xc, Rc, a, a’, b, b’ | Các hằng số hệ số khuếch đại liên quan đến bộ bù tải | |

3.2. Biến số
Ur | Đầu ra của bộ điều chỉnh |
Uf | Điện áp kích từ của máy phát, đầu ra hệ thống kích từ (theo đơn vị tương đối của điện áp kích từ khe hở không khí của máy phát) |
If | Dòng điện kích từ của máy phát (theo đơn vị của dòng điện kích từ khe hở không khí của máy phát) |
| Giá trị véctơ và giá trị độ lớn của điện áp đầu nối của máy phát (theo đơn vị tương đối của giá trị danh định) |
| Giá trị véctơ và giá trị độ lớn của dòng điện đầu nối của máy phát (theo đơn vị tương đối của giá trị danh định) |
Ue | Điện áp của bộ kích từ phía sau điện kháng chuyển mạch (theo đơn vị tương đối của điện áp kích từ khe hở không khí của máy phát) |
UREF | Điện áp chuẩn của bộ điều chỉnh (được xác định đáp ứng các điều kiện ban đầu) |
UB | Điện áp đầu ra của thành phần nguồn dòng của bộ kích từ hỗn hợp |
USS | Đầu ra bộ ổn định hệ thống điện |
UERR | Tín hiệu lỗi của kênh điều khiển điện áp |
Uie | Điện áp rơi trên điện trở kích từ của bộ kích từ |
Phụ lục A
(quy định)
Hệ đơn vị tương đối
Dòng điện và điện áp của máy phát trong nghiên cứu hệ thống được thể hiện bằng các biến đơn vị tương đối. Chúng thường được rút ra từ hệ đơn vị tương đối trong đó một đơn vị được định nghĩa như sau:
- là điện áp danh định, đối với điện áp đầu nối máy phát;
- là dòng điện danh định, đối với dòng điện stato;
- là dòng điện cần thiết để sinh ra điện áp đầu nối máy phát danh định trên đường khe hở không khí của máy phát, đối với dòng điện kích từ của máy phát;
- là điện áp kích từ tương ứng, đối với điện áp kích từ của máy phát.
Các mô hình hệ thống kích từ cần có điểm chung với các mô hình máy phát ở cả đầu nối stato và đầu nối kích từ. Các tín hiệu được tổng hợp lại với điện áp đầu nối máy phát theo đơn vị tương đối ở đầu vào của bộ điều chỉnh điện áp cần tương thích với các biến đơn vị tương đối. Dòng điện đầu ra của bộ kích từ cần ở đơn vị tương đối trên cơ sở dòng điện kích từ của máy phát, và điện áp đầu ra của bộ kích từ cần ở đơn vị tương đối trên nền điện áp kích từ của máy phát.
Phụ lục B
(quy định)
Đặc tính điều chỉnh của bộ chỉnh lưu
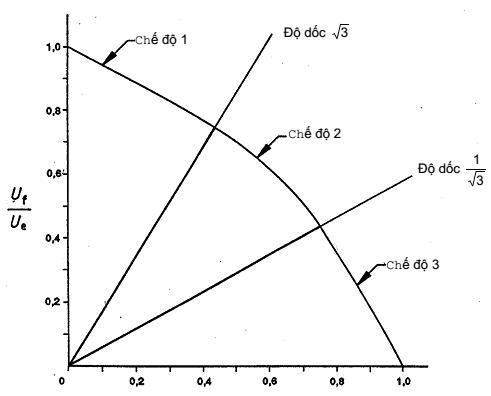
Tất cả các nguồn xoay chiều cấp nguồn cho các mạch điện của bộ chỉnh lưu đều có trở kháng trong phần lớn là điện cảm. Hiệu ứng của các trở kháng này làm thay đổi quá trình chuyển mạch và gây ra việc giảm rất phi tuyến trong điện áp trung bình đầu ra của bộ chỉnh lưu do dòng điện tải của bộ chỉnh lưu tăng lên. Các mạch cầu ba pha đối xứng thường được sử dụng có ba chế độ làm việc khác nhau. Các phương trình đặc trưng cho ba chế độ này được xác định bằng dòng điện tải của bộ chỉnh lưu.
Hình B.1 thể hiện đặc tính của điện áp tải theo dòng điện tải và các phương trình tương ứng. Đối với các giá trị nhỏ của XE, chỉ cần mô hình hóa chế độ làm việc 1, như thể hiện bằng mô hình trên Hình 9.
![]()
Nếu ![]() thì
thì 
Nếu ![]() thì
thì 
nếu ![]() thì
thì 
Hình B.1 - Đặc tính điều chỉnh của bộ chỉnh lưu và phương trình tương ứng Hàm bão hòa
PHỤ LỤC C
(quy định)
Hàm bão hòa
Hàm bão hòa của bộ kích từ SE phản ánh sự tăng các yêu cầu kích từ của bộ kích từ do bão hòa. Tại điện áp đầu ra của bộ kích từ, các đại lượng A, B, C được định nghĩa là sự kích từ cần thiết của bộ kích từ để sinh ra điện áp đầu ra trên đường cong bão hòa tải điện trở không đổi, trên đường thẳng khe hở không khí và trên đường cong bão hòa không tải một cách tương ứng (Hình C.1).
Đối với bộ kích từ xoay chiều, khi hiệu ứng phụ thuộc tải không được mô hình riêng rẽ (mô hình trên Hình 7) và đối với bộ kích từ một chiều có vành góp:
![]()
Đối với bộ kích từ xoay chiều, khi hiệu ứng phụ thuộc tải của cuộn kháng đồng bộ và cuộn kháng chuyển mạch được mô hình riêng rẽ (Hình 6):
![]()
Nhìn chung, hàm bão hòa có thể được xác định bằng hai điểm, thường được chọn ở 1,0 lần và 0,75 lần giá trị trần của điện áp đầu ra bộ kích từ.
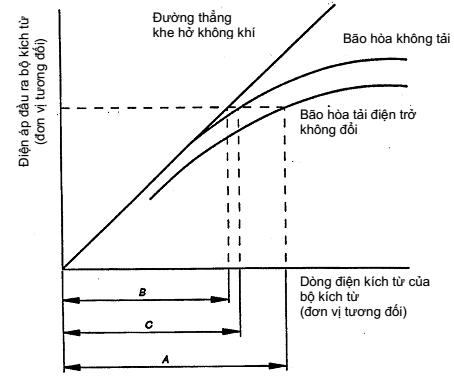
Hình C.1 - Đặc tính bão hòa của bộ kích từ
Phụ lục D
(quy định)
Thể hiện các giới hạn
Trong mạch điều khiển và bộ kích từ, việc lập mô hình hai loại giới hạn phải được xét đến. Giới hạn “wind-up” cho phép đầu ra y vượt quá các giới hạn, nhưng đại lượng x chỉ được thay đổi bên trong các giới hạn (xem Hình D.1). Giới hạn “non-wind-up” (Hình D.2) không cho phép đại lượng bị giới hạn y vượt quá các giới hạn, mà trong phần cứng có thể phải có một số dạng phản hồi. Mô tả toán học của giới hạn non-wind-up cho trên Hình D.2 không áp dụng cho chức năng trễ được thể hiện.
Nếu giới hạn non-wind-up được áp dụng cho các hàm phức hơn, thì việc thể hiện đầy đủ một cách không đơn giản sẽ phụ thuộc vào hàm đó. Ví dụ, bộ điều chỉnh PI của Hình 16 có giới hạn non-wind- up, vì thể hiện ký hiệu điều chỉnh trên cùng một hình. Trong mô hình chi tiết, giới hạn non-wind-up sinh ra từ giới hạn wind-up trong phần tỷ lệ của tuyến theo hướng tiến với hệ số khuếch đại KR và phản hồi xung quanh phần tử này.
Hình D.1 - Bộ giới hạn wind-up
Các phương trình của hệ thống: dy/dt= (u - y)/T
Nếu B ≤ y ≤ A thì x = y
Nếu y > A thì x = A
Nếu y < b="" thì="" x="">

Hình D.2 - Bộ giới hạn non-wind-up
Các phương trình của hệ thống: f = (u - y)/T
Nếu y= A và f > 0 thì dy/dt được đặt bằng 0
Nếu y = B và f < 0="" thì="" dy/dt="" được="" đặt="" bằng="">
Nếu không thì dy/dt = f
B ≤ y ≤ A
Phụ lục E
(tham khảo)
Ví dụ về xây dựng các mô hình máy tính dùng cho hệ thống kích từ đặc biệt
Hình E.1 | Ví dụ về bộ kích từ tĩnh có điều khiển PID dùng cho điện áp đầu nối của máy điện đồng bộ không sử dụng bộ hạn chế |
Hình E.2 | Ví dụ về ứng dụng bộ hạn chế dòng điện kích từ trên bộ kích từ tĩnh có điều khiển PID của điện áp đầu nối máy điện đồng bộ Giới hạn dòng điện kích từ If ref, có thể là hằng số hoặc được điều chỉnh trong quá trình làm việc theo ứng dụng. |
Hình E.3 | Ví dụ về bộ kích từ tĩnh với điều khiển PID của điện áp đầu nối máy điện đồng bộ và với điều khiển dòng điện kích từ trong mạch vòng nhỏ. |
Hình E.4 | Ví dụ về bộ kích từ xoay chiều có điều khiển PID của điện áp đầu nối máy điện đồng bộ và với điều khiển dòng điện kích từ song song. Bộ khuếch đại trung gian là bộ biến đổi thyristo được nuôi từ nguồn áp không đổi như một PMG. |
Hình E.5 | Ví dụ về bộ kích từ xoay chiều có điều khiển PID của điện áp đầu nối máy điện đồng bộ, mạch vòng nhỏ điều khiển dùng cho dòng điện kích từ. Bộ khuếch đại trung gian là bộ biến đổi thyristo được nuôi từ điện áp đầu nối. |
Hình E.1 - Ví dụ ứng dụng: bộ kích từ tĩnh không có bộ hạn chế

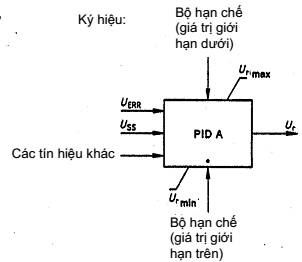
Hình E.2 - Ví dụ ứng dụng: bộ hạn chế dòng điện của bộ kích từ tĩnh thông qua giá trị giới hạn dưới (LV)

Hình E.3 - Ví dụ ứng dụng: bộ kích từ tĩnh có bộ điều chỉnh dòng điện kích từ trong mạch vòng nhỏ
Hình E.4 - Ví dụ ứng dụng: bộ kích từ xoay chiều có điốt-dòng điện kích từ của bộ kích từ từ bộ chỉnh lưu thyristo (nguồn áp không đổi).
Bộ điều chỉnh điện áp có cổng LV bộ giới hạn dòng điện kích từ
Hình E.5 - Ví dụ ứng dụng: bộ kích từ quay có bộ điều chỉnh dòng điện kích từ trong mạch vòng nhỏ
MỤC LỤC
Lời nói đầu
Lời giới thiệu
1. Phạm vi áp dụng
2. Phân loại bộ kích từ - Sự thể hiện bằng hình vẽ và mô hình toán học dùng cho các nghiên cứu về sự ổn định
3. Thuật ngữ
Phụ lục A (quy định) - Hệ đơn vị tương đối
Phụ lục B (quy định) - Đặc tính điều chỉnh của bộ chỉnh lưu
Phụ lục C (quy định) - Hàm bão hòa
Phụ lục D (quy định) - Thể hiện các giới hạn
Phụ lục E (tham khảo) - Ví dụ về xây dựng các mô hình máy tính dùng cho hệ thống kích từ đặc biệt