Nội dung toàn văn Tiêu chuẩn quốc gia TCVN 6627-26:2014 (IEC 60034-26:2006) về Máy điện quay - Phần 26: Ảnh hưởng của điện áp mất cân bằng lên tính năng của động cơ cảm ứng lồng sóc ba pha
TCVN 6627-26:2014
IEC 60034-26:2006
MÁY ĐIỆN QUAY - PHẦN 26: ẢNH HƯỞNG CỦA ĐIỆN ÁP MẤT CÂN BẰNG LÊN TÍNH NĂNG CỦA ĐỘNG CƠ CẢM ỨNG LỒNG SÓC BA PHA
Rotating electrical machines - Part 26: Effects of unbalanced voltages on the performance of three-phase cage induction motors
Lời nói đầu
TCVN 6627-26:2014 hoàn toàn tương đương với IEC 60034-26:2006;
TCVN 6627-26:2014 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC/E1 Máy điện và khí cụ điện biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
Lời giới thiệu
Bộ Tiêu chuẩn Quốc gia TCVN 6627, Máy điện quay được xây dựng trên cơ sở chấp nhận hoàn toàn IEC 60034 do Ban kỹ thuật Tiêu chuẩn Quốc gia TCVN/TC/E1 Máy điện và khí cụ điện xây dựng. Bộ TCVN 6627 (IEC 60034) hiện đã có các tiêu chuẩn sau:
1) TCVN 6627-1:2014 (IEC 60034-1:2010), Máy điện quay - Phần 1: Thông số đặc trưng và tính năng
2) TCVN 6627-2-1:2010 (IEC 60034-2-1:2007), Máy điện quay - Phần 2: Phương pháp tiêu chuẩn để xác định tổn hao và hiệu suất bằng thử nghiệm (không kể máy điện dùng cho xe kéo)
3) TCVN 6627-2A:2001 (IEC 60034-2A:1974), Máy điện quay - Phần 2: Phương pháp thử nghiệm để xác định tổn hao và hiệu suất của máy điện quay (không kể máy điện dùng cho xe kéo). Đo tổn hao bằng phương pháp nhiệt lượng
4) TCVN 6627-3:2010 (IEC 60034-3:2007), Máy điện quay - Phần 3: Yêu cầu cụ thể đối với máy phát đồng bộ truyền động bằng tuabin hơi hoặc tuabin khí
5) TCVN 6627-5:2008 (IEC 60034-5:2000 and amendment 1:2006), Máy điện quay - Phần 5: Cấp bảo vệ bằng vỏ ngoài nhờ thiết kế tích hợp (Mã IP) - Phân loại
6) TCVN 6627-6:2011 (IEC 60034-6:1991), Máy điện quay - Phần 6: Phương pháp làm mát (Mã IC)
7) TCVN 6627-7:2008 (IEC 60034-7:2004), Máy điện quay - Phần 7: Phân loại các kiểu kết cấu, bố trí lắp đặt và vị trí hộp đầu nối (Mã IM)
8) TCVN 6627-8:2010 (IEC 60034-8:2007), Máy điện quay. Phần 8: Ghi nhãn đầu nối và chiều quay
9) TCVN 6627-9:2011 (IEC 60034-9:2007), Máy điện quay. Phần 9: Giới hạn mức ồn
10) TCVN 6627-11:2008 (IEC 60034-11:2004), Máy điện quay - Phần 11: Bảo vệ nhiệt
11) Máy điện quay - Phần 12: Đặc tính khởi động của động cơ cảm ứng lồng sóc ba pha một tốc độ
12) TCVN 6627-14:2008 (IEC 60034-14:2003 and amendment 1:2007), Máy điện quay - Phần 14: Rung cơ khí của một số máy điện có chiều cao tâm trục bằng 56 mm và lớn hơn - Đo, đánh giá và giới hạn độ khắc nghiệt rung
13) TCVN 6627-15:2011 (IEC 60034-15:2009), Máy điện quay - Phần 15: Mức chịu điện áp xung của cuộn dây stato định hình dùng cho máy điện xoay chiều
14) TCVN 6627-16-1:2014 (IEC 60034-16-1:2011), Máy điện quay - Phần 16-1: Hệ thống kích từ máy điện đồng bộ - Định nghĩa
15) TCVN 6627-16-2:2014 (IEC/TR 60034-16-2:1991), Máy điện quay - Phần 16-2: Hệ thống kích từ máy điện đồng bộ - Mô hình để nghiên cứu hệ thống điện
16) TCVN 6627-16-3:2014 (IEC 60034-16-3:1996), Máy điện quay - Phần 16-3: Hệ thống kích từ máy điện đồng bộ - Tính năng động học
17) TCVN 6627-18-1:2011 (IEC 60034-18-1:2010), Máy điện quay - Phần 18-1: Đánh giá chức năng của hệ thống cách điện - Hướng dẫn chung
18) TCVN 6627-18-21:2011 (IEC 60034-18-21:1992 with amendment 1:1994 and amendment 2:1996), Máy điện quay - Phần 18-21: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn kiểu quấn dây - Đánh giá về nhiệt và phân loại
19) TCVN 6627-18-31:2014 (IEC 60034-18-31:2012), Máy điện quay - Phần 18-31: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá về nhiệt và phân loại các hệ thống cách điện sử dụng trong máy điện quay
20) TCVN 6627-18-32:2014 (IEC 60034-18-32:2010), Máy điện quay - Phần 18-32: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá bằng độ bền nhiệt
21) TCVN 6627-18-33:2014 (IEC/TS 60034-18-33:2010), Máy điện quay - Phần 18-33: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá nhiều yếu tố bằng độ bền khi đồng thời chịu ứng suất nhiệt và điện
22) TCVN 6627-18-34:2014 (IEC 60034-18-34:2012), Máy điện quay - Phần 18-34: Đánh giá chức năng hệ thống cách điện - Quy trình thử nghiệm dây quấn định hình - Đánh giá độ bền cơ nhiệt của hệ thống cách điện
23) TCVN 6627-26:2014 (IEC 60034-26:2006), Máy điện quay - Phần 26: Ảnh hưởng của điện áp mất cân bằng lên tính năng của động cơ cảm ứng lồng sóc ba pha
24) TCVN 6627-30:2011 (IEC 60034-30:2008), Máy điện quay - Phần 30: Cấp hiệu suất của động cơ cảm ứng lồng sóc ba pha một tốc độ (Mã IE)
25) TCVN 6627-31:2011 (IEC/TS 60034-31:2010), Máy điện quay - Phần 31: Lựa chọn động cơ hiệu suất năng lượng kể các các ứng dụng biến đổi tốc độ - Hướng dẫn áp dụng
MÁY ĐIỆN QUAY - PHẦN 26: ẢNH HƯỞNG CỦA ĐIỆN ÁP MẤT CÂN BẰNG LÊN TÍNH NĂNG CỦA ĐỘNG CƠ CẢM ỨNG LỒNG SÓC BA PHA
Rotating electrical machines - Part 26: Effects of unbalanced voltages on the performance of three-phase cage induction motors
1. Phạm vi áp dụng
Tiêu chuẩn này mô tả các ảnh hưởng của điện áp mất cân bằng lên tính năng của động cơ cảm ứng lồng sóc ba pha.
2. Tài liệu viện dẫn
Các tài liệu viện dẫn dưới đây là cần thiết để áp dụng tiêu chuẩn này. Đối với các tài liệu viện dẫn có ghi năm công bố thì áp dụng các bản được nêu. Đối với các tài liệu viện dẫn không ghi năm công bố thì áp dụng phiên bản mới nhất (kể cả các sửa đổi).
TCVN 6627-12 (IEC 60034-12), Máy điện quay - Phần 12: Đặc tính khởi động của động cơ cảm ứng lồng sóc ba pha một tốc độ
3. Ảnh hưởng của điện áp mất cân bằng lên tính năng
Ảnh hưởng của các điện áp mất cân bằng lên tính năng của động cơ được mô tả trong 3.1 đến 3.3.
3.1. Dòng điện
Các thành phần thứ tự ngược của điện áp sinh ra trong khe hở không khí từ thông quay ngược chiều quay của roto. Thành phần thứ tự ngược nhỏ của điện áp có thể sinh ra các dòng điện trong cuộn dây cao hơn đáng kể so với dòng điện trong điều kiện điện áp cân bằng. Tần số của dòng điện trong dây quấn roto gần bằng hai lần tần số danh định, do đó trong trường hợp các dây quấn roto có dịch pha dòng điện thì việc tăng tổn thất trong cuộn dây roto về cơ bản là cao hơn việc tăng tổn thất trong cuộn dây stato.
Các dòng điện ở tốc độ làm việc bình thường sẽ mất cân bằng lớn vào khoảng từ 6 đến 10 lần mất cân bằng điện áp.
Dòng điện khóa cứng roto sẽ bị mất cân bằng ở mức độ tương tự các điện áp bị mất cân bằng, nhưng công suất biểu kiến khóa cứng roto sẽ tăng một chút.
3.2. Phát nóng
Độ tăng nhiệt của cuộn dây stato luôn cao hơn so với khi hoạt động ở các điện áp cung cấp cân bằng do việc tăng tổn thất do các thành phần thứ tự ngược của dòng điện và điện áp.
Việc tăng tổn thất roto bị khuếch đại bởi sự dịch pha của dòng điện.
Ngoài ra, sự mất cân bằng điện áp thường đi kèm với việc giảm thành phần thứ tự thuận của điện áp, điều này gây ra việc tăng các thành phần thứ tự thuận của dòng điện trong stato và roto.
3.3. Mômen
Mômen khóa cứng roto, mômen khởi động và mômen cực đại sẽ giảm khi điện áp mất cân bằng. Trong trường hợp mất cân bằng điện áp quá lớn, các mômen này có thể sẽ không thích hợp cho ứng dụng.
Mất cân bằng điện áp đi kèm với việc tạo ra mômen dao động với tần số bằng hai lần tần số lưới. Biên độ của nó tăng tuyến tính với tích của thành phần thứ tự ngược và thuận của điện áp; ở hệ số mất cân bằng fu = 0,05 (xem Điều 4), giá trị đỉnh sẽ nằm trong khoảng 25 % mômen danh định. Khi tốc độ xoắn tới hạn gần đạt tới hai lần tần số lưới thì có thể kích thích các rung động xoắn không được phép của toàn bộ hệ thống trục.
3.4. Tốc độ đầy tải
Tốc độ đầy tải bị giảm nhẹ khi động cơ làm việc ở điện áp mất cân bằng vì độ trượt cao hơn sẽ làm tăng tổn thất của roto.
4. Giảm tải động cơ để ngăn ngừa quá nhiệt
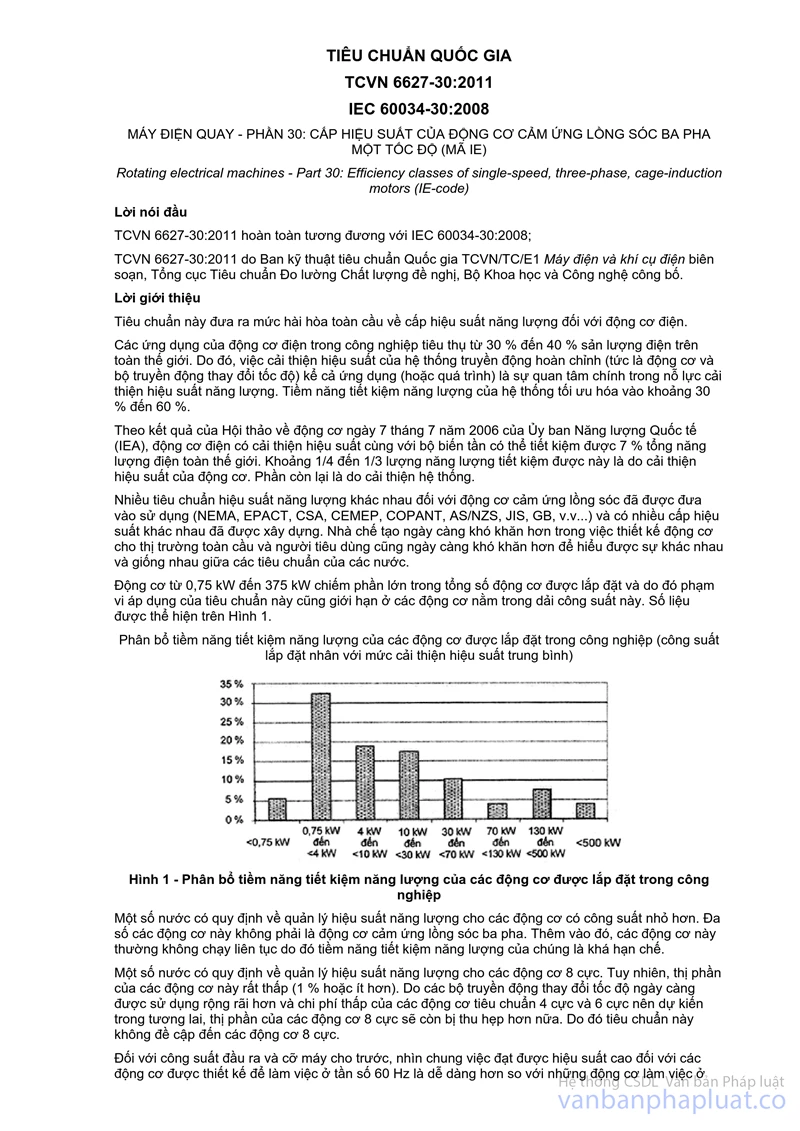
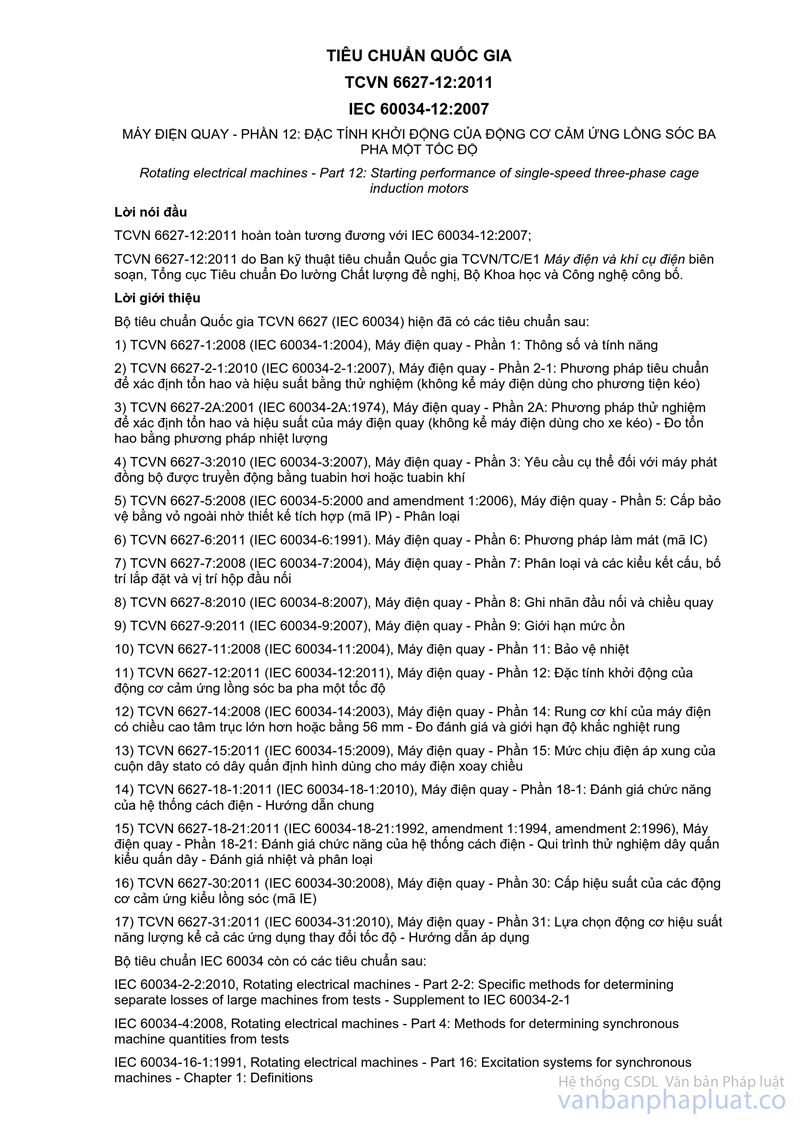
Khi động cơ xoay chiều sử dụng nguồn điện có tần số danh định được nối với hệ thống điện áp ba pha có thành phần thứ tự ngược vượt quá 1 % so với thành phần thứ tự thuận của điện áp trong thời gian dài, (tối thiểu là hằng số thời gian nhiệt của máy điện), công suất cho phép của động cơ nhỏ hơn công suất danh định để giảm khả năng hỏng động cơ. Hệ số giảm tải điển hình đối với động cơ có thiết kế N trong phạm vi áp dụng của TCVN 6627-12 (IEC 60034-12) được cho trong Hình 1 với giả thiết là thành phần thứ tự thuận của điện áp nguồn xấp xỉ điện áp danh định. Không khuyến cáo động cơ hoạt động ở điều kiện mất cân bằng điện áp quá 5 %.
Hệ số mất cân bằng fu trong Hình 1 được xác định như sau:
fu = Un/Up
trong đó
Un là giá trị hiệu dụng của thành phần thứ tự ngược của điện áp nguồn;
Up là giá trị hiệu dụng của thành phần thứ tự thuận của điện áp nguồn.
CHÚ DẪN
Y = hệ số giảm tải
X = hệ số mất cân bằng fu
Hình 1 - Giá trị điển hình của giảm tải của động cơ cảm ứng lồng sóc ba pha thiết kế N trong phạm vi áp dụng của TCVN 6627-12 (IEC 60034-12)
Phụ lục A
(tham khảo)
Xác định các thành phần đối xứng của điện áp pha-pha U1, U2, U3 của hệ thống điện ba pha
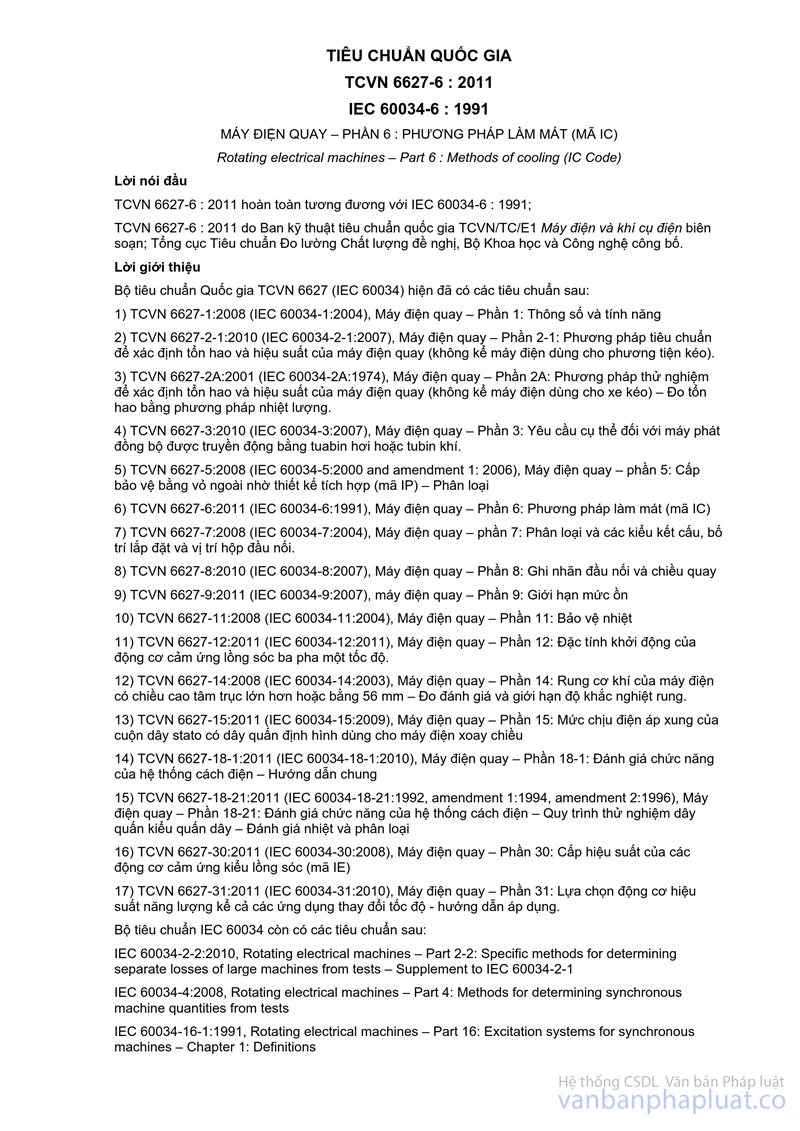
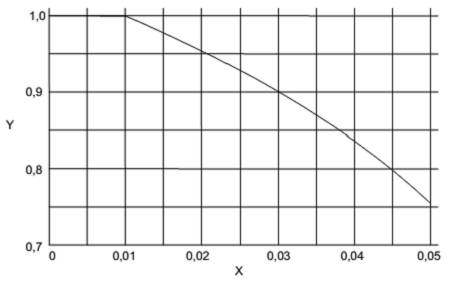
A.1. Xác định bằng đồ họa
Hình A.1 - Biểu đồ pha
Các bước xác định bằng đồ họa của các thành phần đối xứng Up và Un:
· Vẽ biểu đồ pha của ba điện áp U1, U2, U3, tổng của chúng luôn bằng không.
· Dựng một tam giác đều từ một trong ba véctơ điện áp (trên Hình A.1 chọn U1).
· Nối các góc phía trên của hai tam giác tạo được véctơ điện áp Ui.
· Vẽ đường thẳng vuông góc với Ui và gặp góc đối diện của tam giác tạo bởi U1, U2, U3.
· Kéo dài đường thẳng này tạo ra thành phần thứ tự ngược Un, khi đó có chiều dài bằng Ui/![]() .
.
· Nối đỉnh của véctơ điện áp Un và đỉnh của véctơ điện áp U1 ta có véctơ điện áp của thành phần thứ tự thuận Up.
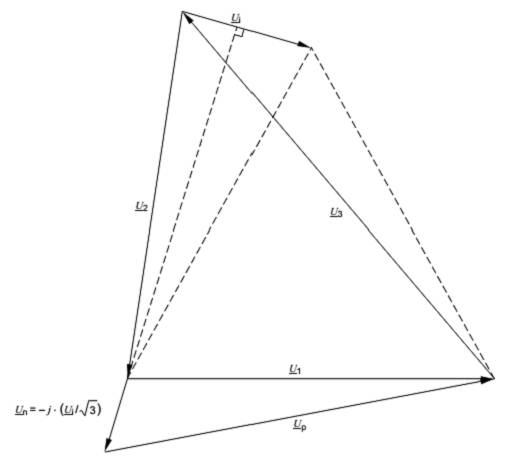
A.2. Xác định bằng cách phân tích
Các thành phần đối xứng được xác định bằng công thức:
Thành phần thứ tự thuận ![]()
Thành phần thứ tự ngược ![]()
trong đó ![]() và (1 + a + a2) = 0
và (1 + a + a2) = 0
Khi đã biết giá trị và góc pha của ba điện áp, các thành phần đối xứng có thể được tính trực tiếp từ các công thức hỗn hợp trên.
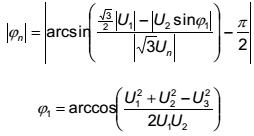
Nếu chỉ biết các giá trị hiệu dụng của các điện áp, các thành phần đối xứng có thể được tính từ các công thức sau, chỉ chứa các đại lượng thực:
trong đó
Phụ lục B
(tham khảo)
Xác định gần đúng
Với mục đích thực tiễn, có thể sử dụng công thức được đơn giản hóa sau đây khi xác định độ lớn của hệ số mất cân bằng fu và được áp dụng cho Hình 1:
![]()
trong đó
Umax là giá trị hiệu dụng của giá trị lớn nhất trong các điện áp U1, U2, U3,
Uaverage là giá trị trung bình của giá trị hiệu dụng của các điện áp U1, U2, U3,
CHÚ THÍCH: Mối tương quan toán học giữa các hệ số fu và f’u được xác định theo Phụ lục A và Phụ lục B là không tồn tại. Hệ số theo Phụ lục B chỉ đưa ra xấp xỉ về thực tế vật lý. Mặc dù thường nhỏ hơn 3 % nhưng trong các trường hợp đặc biệt, hệ số theo Phụ lục A có thể đến 14 % cao hơn giá trị xấp xỉ trong Phụ lục B tạo ra độ lệch lớn nhất 7 % của hệ số giảm tải đạt được.
MỤC LỤC
Lời nói đầu
Lời giới thiệu
1. Phạm vi áp dụng
2. Tài liệu viện dẫn
3. Ảnh hưởng của điện áp mất cân bằng lên tính năng
4. Giảm tải động cơ để ngăn ngừa quá nhiệt
Phụ lục A (tham khảo) - Xác định các thành phần đối xứng của điện áp pha-pha U1, U2, U3 của hệ thống điện ba pha
Phụ lục B (tham khảo) - Xác định gần đúng