Nội dung toàn văn Tiêu chuẩn quốc gia TCVN 7699-2-81:2013 (IEC 60068-2-81:2003) về Thử nghiệm môi trường – Phần 2-81 Các thử nghiệm – Thử nghiệm Ei: Xóc – Tổng hợp phổ đáp tuyến xóc
TIÊU CHUẨN QUỐC GIA
TCVN 7699-2-81:2013
IEC 60068-2-81:2003
THỬ NGHIỆM MÔI TRƯỜNG - PHẦN 2-81: CÁC THỬ NGHIỆM - THỬ NGHIỆM Ei: XÓC - TỔNG HỢP PHỔ ĐÁP TUYẾN XÓC
Environmental testing - Part 2-81: Tests - Test Ei: Shock - Shock response spectrum synthesis
Lời nói đầu
TCVN 7699-2-81:2013 hoàn toàn tương đương với IEC 60068-2-81:2003;
TCVN 7699-2-81:2013 do Ban kỹ thuật tiêu chuẩn quốc gia TCVN/TC/E3 Thiết bị điện tử dân dụng biên soạn, Tổng cục Tiêu chuẩn Đo lường Chất lượng đề nghị, Bộ Khoa học và Công nghệ công bố.
THỬ NGHIỆM MÔI TRƯỜNG - PHẦN 2-81: CÁC THỬ NGHIỆM - THỬ NGHIỆM Ei: XÓC - TỔNG HỢP PHỔ ĐÁP TUYẾN XÓC
Environmental testing - Part 2-81: Tests - Test Ei: Shock - Shock response spectrum synthesis
1. Phạm vi áp dụng
Tiêu chuẩn này quy định các thử nghiệm bằng cách sử dụng phổ đáp ứng xóc tổng hợp (SRS). Tiêu chuẩn này thích hợp để áp dụng chung cho mẫu khi có yêu cầu mô phỏng kích thích tạm thời của một tính chất phức tạp.
2. Tài liệu viện dẫn
Các tài liệu viện dẫn sau đây là cần thiết cho việc áp dụng tiêu chuẩn. Đối với các tài liệu viện dẫn ghi năm công bố thì áp dụng phiên bản được nêu. Đối với các tài liệu viện dẫn không ghi năm công bố thì áp dụng phiên bản mới nhất (kể cả các sửa đổi).
TCVN 7699-1:2007 (IEC 60068-1:1988), Thử nghiệm môi trường - Phần 1: Quy định chung và hướng dẫn
TCVN 7699-2-6:2009 (IEC 60068-2-6:1995), Thử nghiệm môi trường - Phần 2-6: Các thử nghiệm - Thử nghiệm Fc: Rung (hình sin)
IEC 60068-2-27:1987, Environment testing - Part 2 : Test Ea and guidance : Shock (Thử nghiệm môi trường - Phần 2-27, Các thử nghiệm - Thử nghiệm Ea và hướng dẫn: Xóc)[1]
IEC 60068-2-47:1982, Environmental testing - Part 2: Tests - Mouting of components, equipment and other articles for dynamic tests including shock (Ea), bump (Eb), vibration (Fc and Fd) and steady-state acceleration (Ga) and guidance (Thử nghiệm môi trường - Phần 2: Các thử nghiệm - Lắp đặt các thành phần, thiết bị và các vật phẩm để thử nghiệm lực động kể các xóc (Ea), va chạm (Eb), rung (Fc và Fd) và gia tốc trạng thái ổn định (Ga) và hướng dẫn)[2]
TCVN 7699-2-57 (IEC 60068-2-57:1999), Environmental testing - Part 2-57: Tests - Test Ft: Vibration - Time-history method (Thử nghiệm môi trường - Phần 2: Các thử nghiệm - Thử nghiệm Ft: Rung - Phương pháp nhịp hình sin)
IEC 60068-2-64:1993, Environmental testing - Part 2: Tests - Test Fh: Vibration, broad-band random (digital control) and guidance (Thử nghiệm môi trường - Phần 2: Các thử nghiệm - Thử nghiệm Fh: Rung, ngẫu nhiên băng tần rộng (điều khiển số) và hướng dẫn)[3]
ISO 266:1997, Acoustics - Preferred frequencies (Âm học - Tần số chuẩn)
ISO 2041:1990, Vibration and shock - Vocabulary (Rung và xóc - Từ vựng)
3. Định nghĩa
Tiêu chuẩn này áp dụng các thuật ngữ và định nghĩa nêu trong ISO 2041, TCVN 7699-1 (IEC 60068-1), TCVN 7699-2-6 (IEC 60068-2-6), IEC 60068-2-27, IEC 60068-2-57, IEC 60068-2-64 và các định nghĩa dưới đây.
3.1. Độ rộng băng tần -3 dB (-3 dB bandwidth)
Độ rộng băng tần giữa hai điểm trong một hàm đáp ứng tần số là 0,707 của đáp ứng lớn nhất khi kết hợp với một đỉnh cộng hưởng đơn.
3.2. Tắt dần tới hạn (critical damping)
Cản dịu do nhớt tối thiểu, cho phép một hệ thống dịch chuyển để trong thời gian ngắn nhất có thể, trở về vị trí ban đầu mà không có dao động.
3.3. Tần số tới hạn (critical frequency)
Tần số mà tại đó
- bộc lộ sự trục trặc và/hoặc suy giảm tính năng của mẫu do rung, và/hoặc
- xuất hiện cộng hưởng cơ và/hoặc các hiệu ứng khác, ví dụ, lắc.
3.4. Tắt dần (damping)
Thuật ngữ chung được gán cho nhiều cơ chế tiêu tán năng lượng trong hệ thống. Trong thực tế, tắt dần phụ thuộc vào nhiều tham số, ví dụ như kết cấu hệ thống, phương thức rung, sức căng, lực đặt vào, vận tốc, vật liệu, trượt khớp nối, v.v...
3.5. Tỷ số tắt dần (damping ratio)
Tỷ số giữa tắt dần thực tế/tắt dần tới hạn trong hệ thống có tắt dần do nhớt.
3.6. Đềxiben (decibel)
dB
Mối quan hệ giữa các biên độ được viết dưới dạng công thức logarit:
L = 20log10 ![]() (dB)
(dB)
Trong đó:
L là giá trị logarit tính bằng dB;
X/X0 là tỉ số giữa các biên độ X và X0
3.7. Điểm dùng để cố định (fixing point)
Phần của mẫu tiếp xúc với giá cố định hoặc bàn rung tại điểm mà mẫu thường được xiết chặt khi vận hành.
CHÚ THÍCH 1: Nếu một phần của kết cấu dùng để lắp đặt thực tế được sử dụng làm giá cố định thì điểm dùng để cố định là điểm thuộc kết cấu lắp đặt mà không thuộc mẫu.
3.8. gn
Gia tốc tiêu chuẩn do lực hút của trái đất, gia tốc này thay đổi theo độ cao so với mực nước biển và vĩ độ địa lý.
CHÚ THÍCH: Trong tiêu chuẩn này, giá trị gn được làm tròn đến số nguyên gần nhất, tức là 10 m/s2.
3.9. Cửa sổ Hanning (Hanning window)
Hàm trọng số biểu đồ gia tốc mà các lực ban đầu và kết thúc có biểu đồ gia tốc về giá trị không theo cửa sổ thời gian được chọn. Nó có dạng chuông cosin.
CHÚ THÍCH: Xem ISO 18431-2 để biết thêm định nghĩa chi tiết.
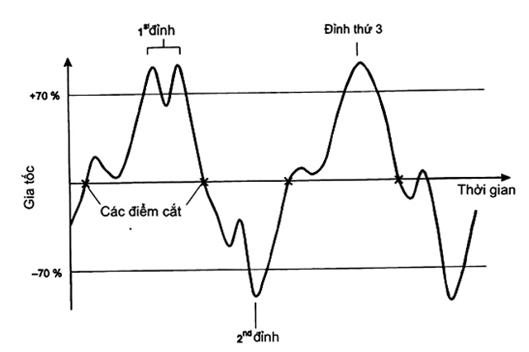
3.10. Tiệm cận tần số cao (high-frequency asymptote)
HFA
Giá trị tiệm cận tần số cao của đường cong SRS (xem Hình 3)
CHÚ THÍCH 1: Tiệm cận tần số cao SRS có ý nghĩa thiết thực là đại diện cho giá trị đỉnh lớn nhất của kích thích biểu đồ gia tốc. Không được nhầm lẫn giá trị tiệm cận với giá trị đỉnh trong SRS.
CHÚ THÍCH 2: Tên gọi khác của tiệm cận tần số cao SRS là gia tốc thời gian - zero (ZPA)
3.11. Điểm đo (measuring point)
Các điểm cụ thể mà tại đó dữ liệu được thu thập khi thực hiện thử nghiệm.Có ba loại điểm đo chính được định nghĩa dưới đây.
3.11.1. Điểm kiểm tra (check point)
Điểm nằm trên giá cố định, trên bàn rung hoặc trên mẫu gần nhất có thể, hoặc kết hợp với một trong các điểm dùng để cố định, và trong mọi trường hợp đều được nối cứng với điểm dùng để cố định đó.
CHÚ THÍCH 1: Một số điểm kiểm tra được sử dụng như một phương tiện để đảm bảo rằng các yêu cầu thử nghiệm được đáp ứng.
CHÚ THÍCH 2: Nếu có ít hơn hoặc bằng bốn điểm dùng để cố định thì sử dụng từng điểm này làm điểm kiểm tra. Nếu có nhiều hơn bốn điểm dùng để cố định thì bốn điểm dùng để cố định đại diện sẽ được xác định trong quy định kỹ thuật liên quan để sử dụng làm các điểm kiểm tra.
CHÚ THÍCH 3: Trong trường hợp đặc biệt, ví dụ đối với các mẫu kích thước lớn hoặc phức tạp, điểm kiểm tra sẽ được quy định trong yêu cầu kỹ thuật liên quan nếu không nằm sát với điểm dùng để cố định.
CHÚ THÍCH 4: Trong trường hợp có một số lượng lớn các mẫu có kích thước nhỏ được lắp đặt trên cùng một cơ cấu cố định, hoặc trong trường hợp mẫu có kích thước nhỏ có một số điểm dùng để cố định thì một điểm kiểm tra duy nhất (tức là điểm chuẩn) có thể được chọn để suy ra tín hiệu điều khiển. Khi đó, tín hiệu này liên quan đến cơ cấu cố định hơn là các điểm dùng để cố định của (các) mẫu. Điều này chỉ có giá trị khi tần số cộng hưởng thấp nhất của cơ cấu cố định đã mang tải cao hơn hẳn so với giới hạn trên của tần số thử nghiệm.
3.11.2. Điểm chuẩn (reference point)
Điểm, được chọn trong số các điểm kiểm tra, mà tín hiệu của nó được sử dụng để điều khiển thử nghiệm.
3.11.3. Điểm đáp ứng (response point)
Điểm nằm trên mẫu được sử dụng để đo đáp ứng trong quá trình khảo sát đáp ứng rung hoặc trong quá trình thử nghiệm. Điểm này không phải là điểm kiểm tra hoặc điểm chuẩn.
CHÚ THÍCH: Có thể có nhiều hơn một điểm đáp ứng được sử dụng.
3.12. Tần số tự nhiên (natural frequency)
Tần số tắt dần hoặc không tắt dần không có rung của một kết cấu chỉ phụ thuộc vào đặc tính vật lý của bản thân nó (khối lượng, độ cứng vững và tắt dần)
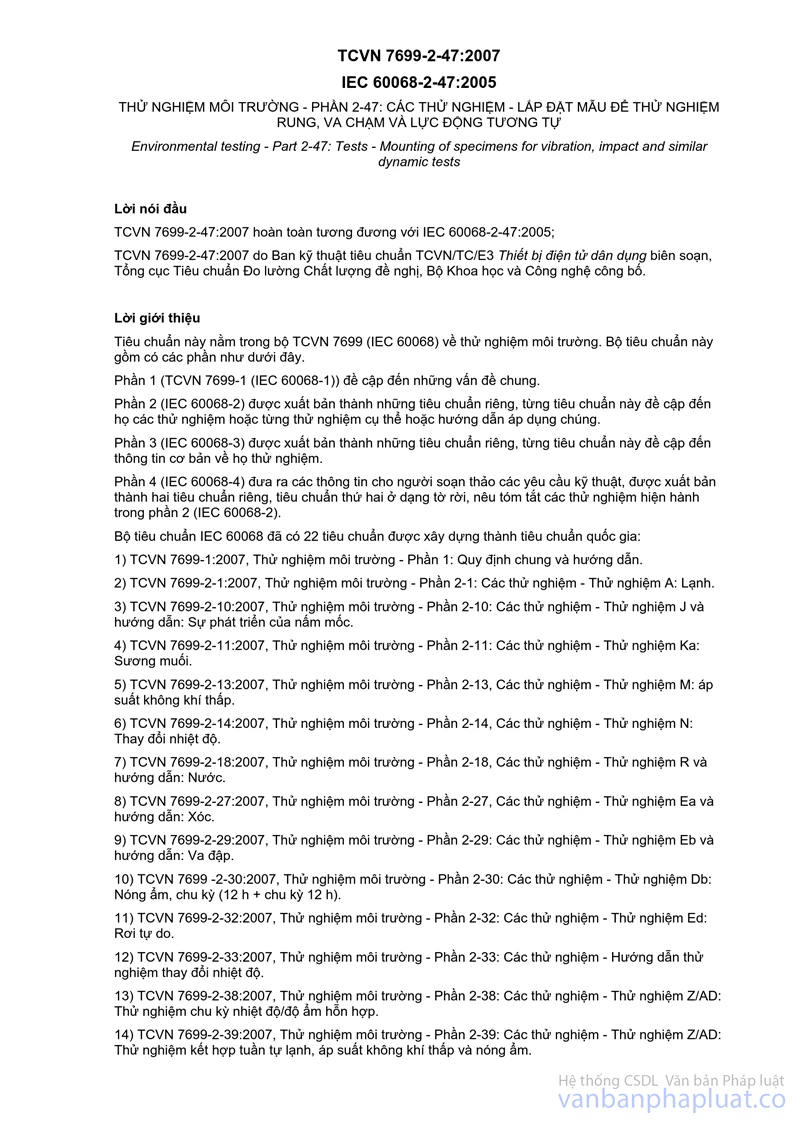
3.13. Số lượng các đỉnh cao của đáp ứng biểu đồ gia tốc (number of high peaks of the response time- history)
Số lượng đỉnh đo được ở điểm đáp ứng hoặc số lượng các đỉnh của đáp ứng biểu đồ gia tốc tính được của một hệ thống một bậc tự do (máy tạo dao động), được kích thích bởi biểu đồ gia tốc, vượt quá giá trị ngưỡng quy định (xem Hình 1).
CHÚ THÍCH 1: Trong thực tế, phải tham khảo các đỉnh cao của đáp ứng biểu đồ gia tốc vì rất khó để nhận biết chu kỳ đáp ứng đầy đủ do kích thích nhất thời.
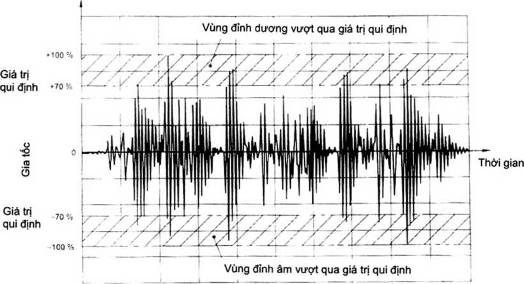
CHÚ THÍCH 2: Đỉnh có độ lệch lớn nhất dương hoặc âm so với đường zero của hai hai điểm cắt cắt ngang zero liên tiếp (xem Hình 2).
CHÚ THÍCH 3: Trong tiêu chuẩn này ưu tiên các đỉnh tính toán thay thay thế các đỉnh đo được vì không phải khi nào cũng đo được đỉnh của đáp ứng biểu đồ gia tốc.
3.14. Máy tạo dao động (oscillator)
Hệ một bậc tự do dùng để tạo ra hoặc có khả năng duy trì dao động cơ.
3.15.
Tạm dừng (pause)
Khoảng thời gian giữa hai biểu đồ gia tốc liên tiếp.
CHÚ THÍCH: Tạm dừng cần có để dẫn đến không có xếp chồng đáng kể của sự chuyển động đáp ứng của mẫu và có thể đạt được từ:
![]()
Trong đó:
T là thời gian (s);
f là tần số tự nhiên không tắt dần thấp nhất (Hz);
d là tỉ số tắt dần ở tần số tự nhiên thấp nhất (tính bằng %).
3.16. Trục thử nghiệm ưu tiên (preferred testing axes)
Ba trục trực giao tương ứng với các trục yếu nhất của mẫu.
3.17. Hệ số Q (Q-factor)
Đại lượng, mà đại lượng này là thước đo độ sắc nét của cộng hưởng, hoặc của tần số lựa chọn của hệ thống cơ dao động cộng hưởng có một bậc tự do. Hệ số Q là một nửa giá trị nghịch đảo của tỷ số tắt dần.
3.18. SRS yêu cầu (required SRS)
SRS được quy định trong quy định kỹ thuật liên quan (xem Hình 3)
CHÚ THÍCH: Quy định kỹ thuật liên quan có thể có nhiều hơn một SRS với hệ số Q khác nhau đối với một số trường hợp thử nghiệm.
3.19. Phổ đáp ứng xóc (shock response spectrum)
SRS
Điểm của đáp ứng lớn nhất (độ dịch chuyển, vận tốc hoặc gia tốc) của chuỗi kích thích cơ bản của hệ một bậc tự do để xác định chuyển động đầu vào là chức năng của tần số tự nhiên không tắt dần và ở hệ số Q quy định.
CHÚ THÍCH 1: Để tính toán, hệ một bậc tự do tuyến tính cố định cơ sở và tắt dần do nhớt là giả định, nếu không có quy định nào khác.
CHÚ THÍCH 2: Quy định kỹ thuật liên quan có thể có một số SRS với hệ số Q khác nhau đối với một số trường hợp thử nghiệm, từ đó yêu cầu phải lựa chọn SRS tùy thuộc vào hệ số Q của mẫu thử nghiệm.
3.20. Tần suất lấy mẫu (sampling frequency)
Số lượng các giá trị biên độ rời rạc được lấy trong mỗi giây để ghi lại hoặc thể hiện một biểu đồ gia tốc dưới dạng kỹ thuật số.
3.21. Dung sai tín hiệu (signal tolerance)
Dung sai tín hiệu St tính bằng phần trăm được xác định là:
![]() (%)
(%)
trong đó:
NF là giá trị hiệu dụng của tín hiệu chưa qua lọc;
F là giá trị hiệu dụng của tín hiệu qua lọc.
CHÚ THÍCH 1: Tham số này áp dụng cho bất kỳ tín hiệu nào, ví dụ gia tốc, tốc độ hoặc khoảng dịch chuyển, được sử dụng để điều khiển thử nghiệm.
CHÚ THÍCH 2: Tham số này chỉ áp dụng cho kích thích bằng rung hình sin.
3.22. Phần chính của biểu đồ gia tốc (strong part of the time-history)
Phần của biểu đồ gia tốc từ thời điểm sườn đầu tiên đạt đến 25 % giá trị lớn nhất đến thời điểm xuống dốc lần cuối cùng về mức 25 % (xem Hình 4)
3.23. Biểu đồ gia tốc tổng hợp (synthesized time-history)
Biểu đồ gia tốc phát sinh mang tính giả tưởng để SRS của nó bao phủ SRS yêu cầu
3.24. Dải tần thử nghiệm (Test frequency range)
Dải tần số được chọn để thử nghiệm tùy thuộc vào tổng hợp của SRS yêu cầu và khả năng của trang thiết bị thử nghiệm có mẫu thử nghiệm đi kèm. Dải tần thử nghiệm có giới hạn dưới (f1) và giới hạn trên (f2) tương ứng với các tần số sóng thấp nhất và cao nhất có thể được sử dụng.
CHÚ THÍCH: Dải tần của SRS là rộng hơn dải tần thử nghiệm và mở rộng tới tần số vô hạn (xem định nghĩa 3.10).
3.25. SRS thử nghiệm (test SRS)
SRS được rút ra ra từ chuyển động thực của điểm chuẩn trên bàn của máy phát rung hoặc máy phân tích hoặc bằng cách sử dụng thiết bị phân tích SRS (xem Hình 3)
3.26. Biểu đồ gia tốc (time-history)
Ghi lại, như một hàm của thời gian, gia tốc, vận tốc hoặc khoảng dịch chuyển.
CHÚ THÍCH: Định nghĩa thuật ngữ toán học “biểu đồ gia tốc” được đề cập trong tiêu chuẩn ISO 2041 và liên quan đến độ lớn của một đại lượng được thể hiện là hàm số của thời gian.
3.27. Cửa sổ thời gian (time window)
Khoảng thời gian tổng hợp của biểu đồ gia tốc thử nghiệm trong đó bao hàm tất cả các gợn sóng
CHÚ THÍCH: Trong một số hệ thống khống chế thử nghiệm, cửa sổ thời gian này được nhân đôi theo khoảng thời gian và thời gian tiến trình chính được đặt ở giữa khung thời gian mới.
3.28. Gợn sóng (wavelet)
Biểu đồ gia tốc có một tần số duy nhất là thành phần của biểu đồ gia tốc tổng hợp đối với thử nghiệm SRS.
CHÚ THÍCH: Không nên nhầm lẫn giữa thuật ngữ “gợn sóng" sử dụng trong tiêu chuẩn này với gợn sóng sử dụng trong lý thuyết gợn sóng và phân tích gợn sóng.
4. Yêu cầu đối với trang thiết bị thử nghiệm
Các đặc trưng được yêu cầu áp dụng cho trang thiết bị thử nghiệm hoàn chỉnh đối với hệ thống thử nghiệm điện động bao gồm hệ thống điều khiển, bộ khuếch đại công suất, bộ tạo rung, cơ cấu cố định và mẫu thử khi được mang tải để thử nghiệm.
Yêu cầu đối với thiết bị thử nghiệm theo các điều từ 4.1 đến 4.3 phải được xác định bằng phương tiện kích thích rung hình sin.
4.1. Chuyển động chính
Chuyển động chính trong quá trình kiểm tra phải là hàm sin theo thời gian và sao cho các điểm dùng để cố định mẫu di chuyển về cơ bản là đồng pha và theo các đường thẳng song song, chịu các giới hạn quy định trong 4.2 và 4.3.
4.2. Chuyển động ngang
Biên độ rung lớn nhất về gia tốc hoặc khoảng dịch chuyển ở các điểm kiểm tra theo trục bất kỳ vuông góc với trục quy định không được vượt quá 50 % biên độ rung của chuyển động chính lên đến 1 000 Hz và cho phép đến 100 % ở trên 1 000 Hz. Các phép đo chỉ cần bao trùm dải tần số thử nghiệm quy định. Trong trường hợp đặc biệt, ví dụ mẫu có kích thước nhỏ, chuyển động ngang cho phép có thể được giới hạn ở 25 %, nếu có quy định trong yêu cầu kỹ thuật liên quan.
Trong trường hợp chuyển động quay của bàn rung có nhiều khả năng trở nên quan trọng, mức dung sai phải được quy định trong quy định kỹ thuật liên quan và khi đó phải được nêu trong báo cáo thử nghiệm.
Trong một số trường hợp, ví dụ đối với các mẫu có kích thước lớn hoặc có khối lượng lớn hoặc ở các tần số nhất định, khó có thể đạt được những con số đề cập ở trên. Trong các trường hợp như vậy, quy định kỹ thuật liên quan phải quy định áp dụng các yêu cầu dưới đây:
a) chuyển động ngang vượt quá giá trị quy định ở trên phải được ghi lại trong báo cáo thử nghiệm; hoặc
b) Nếu biết rõ chuyển động ngang là không nguy hiểm cho mẫu thì không cần phải theo dõi.
4.3. Dung sai tín hiệu
Nếu không có quy định khác trong quy định kỹ thuật liên quan, phải thực hiện các phép đo dung sai tín hiệu gia tốc. Các phép đo này phải được thực hiện tại điểm chuẩn và phải bao trùm các tần số đến 5000 Hz hoặc năm lần tần số thử nghiệm (f2), chọn giá trị nào thấp hơn. Tuy nhiên, tần số phân tích lớn nhất này có thể được mở rộng đến tần số thử nghiệm cao hơn nữa nếu có quy định trong quy định kỹ thuật liên quan. Nếu không có quy định khác trong quy định kỹ thuật liên quan, dung sai tín hiệu không được vượt quá 5 %.
Trong trường hợp mẫu có kích thước lớn hoặc phức tạp, khi không thể đáp ứng các giá trị dung sai tín hiệu quy định ở một đoạn trong dải tần thì dung sai tín hiệu phải được nêu trong báo cáo cáo thử nghiệm.
4.4. Hệ thống đo
Đặc tính của hệ thống đo phải sao cho có thể xác định được rằng các giá trị đúng của biểu đồ gia tốc đo được theo các trục thích hợp tại điểm chuẩn là nằm trong phạm vi dung sai yêu cầu đối với thử nghiệm.
Đáp ứng tần số của toàn bộ hệ thống đo kể cả bộ chuyển đổi, bộ ổn định tín hiệu, cơ cấu thu thập và xử lý dữ liệu, có thể ảnh hưởng đáng kể lên độ chính xác của phép đo.
Dải tần của hệ thống đo phải được mở rộng từ 0,67 lần tần số gợn sóng sóng thấp nhất (f1) đến 1,5 lần tần số gợn sóng cao nhất (f2) của dải tần số thử nghiệm, (xem thêm 4.2 của IEC 60068-2-17). Đáp ứng tần số của hệ thống đo phải nằm trong khoảng ± 5 % dải tần này.
5. Yêu cầu đối với thử nghiệm
5.1. Khống chế thử nghiệm
Biểu đồ gia tốc thử nghiệm phải là biểu đồ gia tốc tổng hợp bao gồm cả các gợn sóng nằm trong cửa sổ thời gian quy định. Biểu đồ gia tốc này đạt được từ SRS quy định trong quy định kỹ thuật liên quan thể hiện trong 9.3.
Phải sử dụng 5 % giá trị của tỷ số tắt dần (Q - bội số của 10) nếu không có quy định nào khác trong quy định kỹ thuật liên quan. Có thể đạt được các giá trị thay thế từ khảo sát đáp ứng rung (xem 9.2). Khảo sát đáp ứng rung cũng có thể chỉ ra hệ số Q để sử dụng nếu một số SRS (có các hệ số Q khác nhau) được quy định trong quy định kỹ thuật liên quan.
Cách quãng của các gợn sóng theo tần số được lựa chọn tùy thuộc vào hệ số Q quy định dùng cho thử nghiệm như dưới đây:
- ở 1/3 băng tần octave nếu hệ số Q là £ 5;
- ở 1/6 băng tần octave nếu 5 < q=""><>
- ở 1/12 băng tần octave nếu Q ³ 25.
CHÚ THÍCH: Tần số chuẩn đối với các băng tần octave được nêu ở ISO 266.
5.2. Dung sai trên SRS
SRS thử nghiệm, được đo ở điểm chuẩn, phải là SRS yêu cầu ± 1,5 dB (xem Hình 3).
Nếu một phần nhỏ của SRS thử nghiệm, nhỏ hơn 20 % dải tần, nằm trong dải dung sai ±3 dB thì thử nghiệm vẫn có thể được chấp nhận với điều kiện là các điểm không trùng với tần số cộng hưởng tới hạn của mẫu trong dải tần số thử nghiệm. Độ lệch so với SRS yêu cầu phải được nêu trong báo cáo thử nghiệm.
Ở giá trị nhỏ nhất, SRS thử nghiệm phải được kiểm tra với cùng một khoảng cách tần số như được nêu ở 5.1 - việc lựa chọn tùy thuộc vào hệ số Q.
5.3. Tính SRS thử nghiệm
Để duy trì sai số nhỏ nhất, khi tính SRS thử nghiệm, phải quan tâm đặc biệt đến việc lấy mẫu và lọc tín hiệu từ điểm chuẩn.
Khuyến cáo rằng tần số lấy mẫu của biểu đồ gia tốc tối thiểu là bội số của 10 hoặc cao hơn tần số cao nhất (f2) để tính toán đáp ứng nếu thuật toán nội suy không được sử dụng cho tính toán SRS tiếp theo.
CHÚ THÍCH: Bằng cách này, đáp ứng biểu đồ gia tốc đối với dao động cao nhất f2 sẽ được tính với sai số biên độ nhỏ hơn 5 %. Nếu sử dụng tần số lấy mẫu là 2,56 f2, như là giá trị phổ biến để phân tích tần số, thì sai số vượt quá 60 % có thể thu được ở đáp ứng lớn nhất của dao động cao nhất f2.
Nếu sử dụng thuật toán nội suy trong tính toán SRS tiếp theo, tần số lấy mẫu có thể thấp hơn 4 lần tần số cao nhất (f2).
Phải thường xuyên sử dụng bộ lọc thông thấp trước khi số hóa biểu đồ gia tốc trong đánh giá để tránh sai số răng cưa. Khuyến cáo rằng điểm nửa công suất của tần số ngưỡng của bộ lọc khử răng cưa là 1,5 f2. Tỷ lệ ngưỡng ít nhất phải là -60dB/octave. Việc sử dụng các giá trị khuyến cáo này để đảm bảo đạt được đáp ứng đầy đủ đối với dao động cao nhất f2 - Sai số ở dao động cao nhất, do thay đổi pha gây ra bởi các bộ lọc chống răng cưa cũng bị khử. Các bộ lọc phải có mối quan hệ tuyến tính giữa pha và tần số.
Phải sử dụng một bộ lọc thông cao nếu sai số tần số thấp hoặc có bù cho điện một chiều làm ảnh hưởng đến thử nghiệm. Khuyến cáo rằng tần số ngưỡng nửa công suất của bộ lọc không cao hơn 0,1 lần tần số thấp nhất (f1) để tính đáp ứng, hoặc 2 Hz, chọn giá trị nào cao hơn.
Sai số cắt cụt có thể thu được nếu biểu đồ gia tốc trong đánh giá hoặc biểu đồ gia tốc đáp ứng của dao động không bị phân rã trong phạm vi khung thời gian tính toán. Điều này đặc biệt quan trọng khi tính toán được thực hiện để tạo dao động làm nhụt thấp. Phải tránh sai số cắt cụt bằng cách sử dụng khung thời gian dài.
CHÚ THÍCH: Lý do căn bản của vấn đề này được ghi lại ở Phụ lục B của TCVN 7699-2-27(IEC 60068-2-27) đưa ra các định nghĩa về SRS “ban đầu” và SRS “dư”. Để đánh giá SRS thử nghiệm, phải tính được SRS lớn nhất.
5.4. Thuật toán để tính SRS
Có rất nhiều cách tính SRS, và mỗi thuật toán được sử dụng có thể lại cho kết quả khác nhau, đặc biệt ở các tần số thấp và tần số cao. Do đó điều quan trọng để sử dụng thuật toán thích hợp để tính toán đúng SRS ở ít nhất là dải tần số thử nghiệm.
5.5. Dải tần số thử nghiệm
Lựa chọn dải tần số thử nghiệm phụ thuộc vào thành phần tần số lớn nhất của môi trường xóc cần mô phỏng và các tần số có thể thực sự tạo ra bởi thiết bị thử nghiệm có kèm theo mẫu.
5.6. Lắp đặt
Mẫu phải được lắp đặt theo IEC 60068-2-47.
Quy định kỹ thuật liên quan phải quy định về hướng và lắp đặt mẫu trong quá trình thử nghiệm và thiết lập điều kiện duy nhất để mẫu được coi là phù hợp với yêu cầu của tiêu chuẩn, trừ khi có thể đưa ra đủ lý lẽ để mở rộng cho một điều kiện không thử nghiệm (ví dụ nếu chỉ ra được rằng trọng lực không ảnh hưởng đến hoạt động của mẫu)
Nếu một mẫu được lắp đặt trên bộ chống rung, nhưng cần thiết phải thực hiện một thử nghiệm mà không có bộ chống rung, mức độ kích thích quy định phải được thay đổi theo cách tính (xem IEC 60068-2-47).
Ảnh hưởng của kết nối, dây cáp, đường ống v.v..phải được xem xét khi lắp đặt mẫu.
6. Mức khắc nghiệt
Mức khắc nghiệt phải được xác định bằng cách kết hợp các tham số sau đây:
a) Tham số bắt buộc
- SRS yêu cầu kể cả hệ số Q của SRS;
- trục thử nghiệm và hướng trục thử nghiệm;
- khoảng thời gian của biểu đồ gia tốc tổng hợp;
- số lần tái diễn;
- dải tần số thử nghiệm.
b) Tham số tùy chọn
- giá trị tiệm cận tần số cao (HFA) của SRS yêu cầu;
- khoảng thời gian của phần chính biểu đồ gia tốc tổng hợp;
- số lượng các đỉnh cao của biểu đồ gia tốc đáp ứng;
- phổ Fu-ri-ê
- mật độ phổ năng lượng;
- miền thời gian hiệu dụng của biểu đồ gia tốc tổng hợp (xem Điều B.2);
- miền tần số hiệu dụng của biểu đồ gia tốc (xem Điều B.2);
CHÚ THÍCH: Liệt kê các tham số tùy chọn này là không đầy đủ, xem thêm Phụ lục B.
Quy định kỹ thuật liên quan phải nêu các giá trị cho từng tham số dựa trên các khuyến cáo nêu trong các điều từ 6.1 đến 6.5.
Tham số tùy chọn có thể cần thiết nếu mẫu không chỉ được thử nghiệm về sự tồn tại của một đáp ứng nào đó mà còn về độ mỏi chu kỳ thấp (các đáp ứng lặp lại)
6.1. SRS yêu cầu
Quy định kỹ thuật liên quan phải nêu mức và dạng của SRS yêu cầu đối với mỗi trường hợp thử nghiệm, kể cả hệ số Q, dung sai và giá trị tùy chọn tiệm cận tần số cao (HFA) của SRS. SRS phải được quy định như một phổ lớn nhất. Quy định kỹ thuật liên quan cũng phải quy định các trục và hướng của mẫu mà theo đó phải đặt mỗi phổ, khi chúng không hoàn toàn giống nhau đối với tất cả các trục.
CHÚ THÍCH: Quy định kỹ thuật liên quan có thể bao gồm một số SRS có hệ số Q khác nhau đối với mỗi trường hợp thử nghiệm nhất định.
6.2. Thời gian của biểu đồ gia tốc tổng hợp
Quy định kỹ thuật liên quan phải nêu thời gian của mỗi biểu đồ gia tốc trong đó các giá trị khuyến cáo tính bằng giây hoặc một phần của giây được đưa ra bởi dãy các số sau đây: ...1; 2; 3; 5; 10...
CHÚ THÍCH: Việc chọn thời gian của biểu đồ gia tốc tổng hợp phụ thuộc vào tần số lấy mẫu được sử dụng cho SRS tổng hợp và cửa sổ thời gian. Do đó không phải lúc nào cũng có thể có được thời gian sát với dây ở trên.
Trong một số trường hợp, quy định kỹ thuật liên quan có thể yêu cầu phần chính của biểu đồ gia tốc là tỷ lệ phần trăm của thời gian tổng. Nói cách khác, trừ khi bị cản trở bởi các yêu cầu của 6.5, giá trị của phần chính phải được chọn từ các tỷ lệ phần trăm của thời gian tổng:
25 %, 50 %, 75 %.
Giá trị lựa chọn phải được nêu trong báo cáo thử nghiệm.
6.3. Số lần lập lại
Quy định kỹ thuật liên quan phải quy định số lần lập lại của biểu đồ gia tốc cần áp dụng cho mẫu theo các trục và các hướng có liên quan.
Nếu không có quy định nào khác, số lần lập lại áp dụng cho mỗi trục, mỗi hướng thử nghiệm và trong từng trường hợp thử nghiệm phải được chọn từ các dãy số sau đây: 1; 2; 5; 10; 20; 50...
Khi sử dụng nhiều hơn một mức thử nghiệm biểu đồ gia tốc, thử nghiệm phải luôn được bắt đầu ở mức thấp nhất và tiếp tục ở các mức cao hơn, mỗi mức cách nhau một tạm dừng.
6.4. Dải tần số thử nghiệm
Dải tần số thử nghiệm phải được đưa ra trong quy định kỹ thuật liên quan bằng cách lựa chọn các giới hạn tần số càng gần các dãy số sau đây càng tốt: ...1; 2; 5; 10; 20; 50 ... giới hạn tần số thấp nhất (f1) phải bắt đầu ở giá trị 0,1 Hz và giới hạn tần số cao nhất (f2) không được vượt quá 5000 Hz.
CHÚ THÍCH: Các giá trị của dải tần số phụ thuộc vào tần số lấy mẫu được sử dụng đối với SRS tổng hợp và cửa sổ thời gian. Do đó không phải lúc nào cũng có thể sát với dãy ở trên.
6.5. Số lượng các đỉnh cao trong một biểu đồ gia tốc đáp ứng tính được của hệ một bậc tự do
Quy định kỹ thuật liên quan phải nêu số lượng các đỉnh cao trong biểu đồ gia tốc đáp ứng tính được của hệ một bậc tự do dẫn đến các giá trị lớn hơn giá trị ngưỡng quy định.
Các đỉnh cao của biểu đồ gia tốc đáp ứng là mức khắc nghiệt tùy chọn, có thể áp dụng tốt khi thử nghiệm cần quan tâm là thử nghiệm độ mỏi chu kỳ thấp.
Việc tính toán các đỉnh cao của biểu đồ gia tốc đáp ứng phải được thực hiện trên biểu đồ gia tốc đáp ứng đầy đủ từ hệ một bậc tự do đã chọn được kích thích bởi biểu đồ gia tốc tổng hợp. Tần số tự nhiên không tắt dần và hệ số Q của hệ này phải được chọn từ các kết quả khảo sát đáp ứng rung hoặc từ đánh giá các tham số đó.
Các đỉnh cao của biểu đồ gia tốc đáp ứng phải được biểu thị bằng phần trăm giá trị SRS yêu cầu ở tần số tự nhiên liên quan đối với mẫu thử nghiệm.
Nếu không có quy định nào khác trong quy định kỹ thuật liên quan, số lượng đỉnh cao của biểu đồ gia tốc đáp ứng phải nằm trong dải từ 3 đến 20, liên quan đến giá trị ngưỡng 70 % với tỷ số tắt dần từ 2 % đến 10 % (hệ số Q từ 5 đến 25). Các đỉnh dương và đỉnh âm xen kẽ phải là các khoảng chia đều.
7. Ổn định trước
Quy định kỹ thuật liên quan phải có các yêu cầu về ổn định trước và khi đó phải quy định các điều kiện.
8. Phép đo ban đầu
Mẫu thử nghiệm phải được giao nộp để kiểm tra bằng mắt, kiểm tra về kích thước và kiểm tra chức năng theo quy định kỹ thuật liên quan.
Một khảo sát đáp ứng ban đầu phải được hoàn thành, nếu không có quy định nào khác trong quy định kỹ thuật liên quan (xem 9.2).
9. Thử nghiệm
9.1. Yêu cầu chung
Mẫu thử nghiệm phải được kích thích ở một trong ba trục thử nghiệm ưu tiên trừ khi quy định kỹ thuật liên quan có quy định khác. Trình tự thử nghiệm dọc theo các trục này là không quan trọng trừ khi có quy định trong quy định kỹ thuật liên quan.
Mẫu phải được kích thích bằng cách cho chuyển động máy phát rung thực hiện theo SRS quy định. Hầu hết các nguồn cung cấp của hệ thống điều khiển cho máy phát rung điện động cung cấp phần mềm riêng quy định để phát ra các tín hiệu truyền động liên quan.
9.2. Khảo sát đáp ứng rung
Khi có quy định trong quy định kỹ thuật liên quan, đáp ứng động lực học của mẫu thử nghiệm trong dải tần xác định phải được khảo sát.
Khảo sát đáp ứng phải được thực hiện với kích thích hình sin hoặc kích thích ngẫu nhiên ở dải tần thử nghiệm hoặc ở ít nhất là 5 lần tần số tự nhiên không tắt dần thứ nhất, chọn giá trị nào thấp hơn, và mức thử nghiệm quy định bởi quy định kỹ thuật liên quan.
Tham khảo TCVN 7699-2-6 (IEC 60068-2-6) đối với rung hình sin và IEC 60068-2-64 đối với rung ngẫu nhiên.
Khảo sát đáp ứng phải thực hiện với mức thử nghiệm được chọn sao cho đáp ứng của mẫu còn lại nhỏ hơn trong quá trình thử nghiệm SRS nhưng ở mức đủ cao để phát hiện tần số tới hạn.
Khảo sát đáp ứng có kích thích hình sin phải thực hiện với tốc độ quét logarit không cao hơn một octove trên phút, nhưng có thể giảm nếu cần xác định chính xác hơn đặc tính đáp ứng. Phải tránh thời gian dừng quá lâu.
Khảo sát đáp ứng với rung tự nhiên phải được thực hiện có tính đến thời gian thử nghiệm phải đủ dài để giảm thiểu rung một cách ngẫu nhiên theo đáp ứng. Độ phân giải tần số phải đủ cao để xác định đủ các đỉnh đáp ứng (băng thông hẹp nhất -3 dB). Khuyến cáo rằng có ít nhất năm vạch phổ chứa trong băng thông hẹp nhất -3 dB.
Mẫu thử nghiệm phải cho hoạt động trong khảo sát này nếu có yêu cầu trong quy định kỹ thuật liên quan. Khi không thể thực hiện khảo sát đáp ứng vì mẫu đang hoạt động thì phải thực hiện khi mẫu không hoạt động. Mẫu phải được kiểm tra để xác định các tần số tới hạn rồi nêu trong báo cáo thử nghiệm.
Thực hiện khảo sát đáp ứng bổ sung là bắt buộc sau khi hoàn thành thử nghiệm SRS, nếu không có quy định khác trong quy định kỹ thuật liên quan, để so sánh các tần số tới hạn trước và sau thử nghiệm SRS. Nhất thiết là cả hai lần khảo sát đáp ứng rung đều phải được thực hiện theo cùng một cách và ở cùng mức thử nghiệm.
Các tần số tới hạn trước và sau thử nghiệm phải được nêu trong báo cáo thử nghiệm.
Quy định kỹ thuật liên quan phải nêu những công việc cần thực hiện nếu có bất cứ sự thay đổi nào về tần số.
9.3. Tổng hợp biểu đồ gia tốc thử nghiệm
Các bước khác nhau để tổng hợp biểu đồ gia tốc thử nghiệm được tóm tắt dưới đây (xem Phụ lục C).
Điều này là cần thiết để tổng hợp biểu đồ gia tốc thử nghiệm đối với mỗi trường hợp thử nghiệm SRS bằng cách thực hiện các bước sau đây và lựa chọn tham số thích hợp:
a) Gợn sóng được sử dụng để tổng hợp biểu đồ gia tốc thử nghiệm
Có một số kiểu gợn sóng để lựa chọn. Thường sử dụng nhiều nhất là:
1) hình sin suy giảm theo hàm mũ;
2) mẫu của các sóng sin có biên độ không đổi;
3) đột biến sin với số lượng sóng sin nằm trong cửa sổ Haning
b) Dải tần thử nghiệm
Lựa chọn dải tần thử nghiệm, có tính đến các tần số lấy mẫu có sẵn (xem 5.3, 5.5 và 6.4)
c) Cửa sổ thời gian
Lựa chọn thời gian của cửa sổ thời gian có tính đến bước b) trên đây.
d) Cách quãng theo tần số của gợn sóng
Lựa chọn cách quãng theo tần số của gợn sóng theo 5.1.
e) Hệ số Q
Lựa chọn hệ số Q được sử dụng trong quá trình thử nghiệm theo quy định kỹ thuật liên quan hoặc theo khảo sát đáp ứng rung (xem 5.1 và 9.2)
f) Khoảng thời gian của gợn sóng
Điều chỉnh khoảng thời gian của gợn sóng theo 6.2.
g) SRS yêu cầu
Đặt giá trị đỉnh của mỗi gợn sóng theo SRS yêu cầu.
h) Các giá trị ban đầu khác đối với các tham số được sử dụng để tổng hợp biểu đồ gia tốc thử nghiệm, ví dụ như:
- Độ trễ (thời gian bắt đầu của gợn sóng)
- Cực tính (dương hoặc âm ban đầu của gợn sóng)
- Số nửa chu kỳ (kiểu 2) và 3) gợn sóng)
i) Tổng hợp biểu đồ gia tốc ở hệ thống điều khiển
Tổng hợp biểu đồ gia tốc thử nghiệm ban đầu ở hệ thống điều khiển nhưng không kích thích bàn máy phát rung.
j) So sánh SRS thử nghiệm ban đầu với SRS yêu cầu
So sánh phải thực hiện liên quan tới dung sai và các tham số ở quy định kỹ thuật liên quan (xem 5.2 và Điều 6).
k) Điều chỉnh các tham số
Thực hiện điều chỉnh các tham số của biểu đồ gia tốc ở bước f) nếu cần thiết, và tiếp tục lặp lại ở bước g) và h) đến khi dung sai và các tham số đối với SRS yêu cầu được đáp ứng và có liên quan đến các giới hạn về lực, độ dịch chuyển, vận tốc và gia tốc của máy phát rung.
I) Lưu lại biểu đồ gia tốc tổng hợp
Lưu lại biểu đồ gia tốc tổng hợp và thử nghiệm bắt đầu theo 9.4. Phải tiếp tục lặp lại biểu đồ gia tốc thử nghiệm trong suốt giai đoạn thử nghiệm này.
m) Các trục kích thích và hướng còn lại
Lặp lại quy trình đối với các trục kích thích và các hướng còn lại, nếu mức khắc nghiệt có khác nhau theo các trục và các hướng này.
CHÚ THÍCH: Bước này cũng có thể được thực hiện sau khi thử nghiệm tới mức đầy đủ theo một số trục và hướng (xem 9.4, bước e)).
9.4. Thử nghiệm với biểu đồ gia tốc thử nghiệm tổng hợp
Các nấc khác nhau để thử nghiệm với biểu đồ gia tốc thử nghiệm tổng hợp được thể hiện dưới đây (xem Hình 5 và Phụ lục C).
a) Lắp đặt mẫu thử nghiệm hoặc vật giả
Lắp đặt mẫu thử nghiệm (hoặc vật giả tương đương động) trên bàn máy phát rung theo trục và hướng kích thích liên quan.
b) Kích thích mẫu ở mức thử nghiệm thấp -18 dB
Kích thích mẫu bằng tín hiệu dùng cho biểu đồ gia tốc thử nghiệm tổng hợp từ 9.3 I) ở mức - 18 dB. Để hệ thống thử nghiệm lặp lại tối đa là 6 lần cho đến khi hình dạng và các tham số của SRS yêu cầu được đáp ứng phù hợp với mức thử nghiệm thấp hơn. Lưu lại tín hiệu truyền động này.
CHÚ THÍCH 1: Trong một số trường hợp bước c) -12 dB có thể gọi là nấc bắt đầu thử nghiệm.
c) Kích thích mẫu ở mức thử nghiệm thấp - 12 dB
Kích thích mẫu thử nghiệm ở mức thử nghiệm thấp - 12 dB có lưu lại tín hiệu truyền động từ giai đoạn lặp lại -18 dB (9.4, bước a) và b)). Để hệ thống thử nghiệm lặp lại tối đa là 6 lần cho đến khi đáp ứng các tham số của SRS yêu cầu. Lưu lại tín hiệu truyền động.
CHÚ THÍCH 2: Trong một số trường hợp, điều này có thể được ưu tiên bắt đầu thử nghiệm.
d) Tăng mức thử nghiệm
Tăng mức thử nghiệm theo các nấc, ban đầu là 6 dB và sau đó là 3 dB. Kích thích lặp lại ít nhất hai lần cho mỗi mức đến mức thử nghiệm đầy đủ và lưu tín hiệu truyền động ở mỗi nấc thử nghiệm. Cho hệ thống thử nghiệm lặp lại sau mỗi kích thích để kiểm soát xem SRS yêu cầu có đáp ứng với dung sai quy định hay không.
CHÚ THÍCH 3: Tăng mức thử nghiệm từ -3 dB đến mức đầy đủ có thể làm theo các nấc 1 dB nếu cần thiết. Số lần lặp lại phải được giảm xuống tối đa là 1 trong các trường hợp này.
e) Thử nghiệm ở mức đầy đủ
Lặp lại thử nghiệm mức đầy đủ nhiều lần như được nêu trong quy định kỹ thuật liên quan theo cùng một trục và hướng kích thích. Cho hệ thống thử nghiệm lặp lại để khống chế SRS.
Tạm dừng đủ dài giữa hai biểu đồ gia tốc liên tiếp sao cho không có xếp chồng đáng kể chuyển động đáp ứng của mẫu.
f) Trục thử nghiệm tiếp theo
Lặp lại các bước từ a) đến e) đối với các trục và hướng thử nghiệm tiếp theo, quy định bởi quy định kỹ thuật liên quan có tính đến bước m) của 9.3.
CHÚ THÍCH 4: Người thao tác thử nghiệm quyết định có thể bắt đầu ở trục mới với bước b), hoặc c).
g) Tài liệu thử nghiệm
SRS và các tham số quan tâm khác phải được lập thành tài liệu trong phạm vi mức thử nghiệm đầy đủ. Ghi lại mỗi kích thích nếu số lần lặp lại từ 1 đến 10, và mỗi thứ ba, nếu số lượng lớn hơn 10. Quy định kỹ thuật liên quan có thể quy định các điều kiện khác.
10. Phép đo trung gian
Khi có quy định trong quy định kỹ thuật liên quan, mẫu phải hoạt động trong quá trình tiến hành số lượng quy định các thử nghiệm SRS và phải kiểm tra tính năng của nó
11. Phục hồi
Khi có quy định trong quy định kỹ thuật liên quan, đôi khi cần một khoảng thời gian sau khi thử nghiệm và trước khi thực hiện các phép đo cuối cùng để mẫu có thể đạt được một số điều kiện, ví dụ như nhiệt độ nếu cần phải có ở phép đo ban đầu.
12. Phép đo kết thúc
Khảo sát đáp ứng cuối cùng phải được hoàn thành nếu không có quy định khác trong quy định kỹ thuật liên quan (xem 9.2).
Mẫu phải được giao nộp để kiểm tra bằng cách xem xét, kiểm tra kích thước và kiểm tra chức năng theo quy định trong quy định kỹ thuật liên quan.
Quy định kỹ thuật liên quan phải đưa ra các tiêu chí để dựa trên đó chấp nhận hoặc loại bỏ mẫu.
13. Thông tin cần nêu trong quy định kỹ thuật liên quan
Khi thử nghiệm này được nêu trong quy định kỹ thuật liên quan thì phải nêu các nội dung dưới đây nếu thuộc đối tượng áp dụng, chú ý đến các hạng mục có đánh dấu (*) vì đây là thông tin luôn được yêu cầu.
Điều
a) Chuyển động ngang 4.2
b) Dung sai tín hiệu 4.3
c) Dung sai trên SRS yêu cầu* 5.2
d) Dải tần số thử nghiệm* 5.5, 6.4
e) Lắp đặt mẫu thử nghiệm * 5.6
f) SRS yêu cầu* 5.1 và 6.1
g) Trục thử nghiệm và hướng* 6.1, 9.1
h) Thời gian biểu đồ gia tốc thử nghiệm 6.2
i) Thời gian phần chính biểu đồ gia tốc thử nghiệm 6.2
j) Số lần lặp lại 6.3
k) Số lượng đỉnh cao trong biểu đồ gia tốc đáp ứng tính được 6.5
l) Ổn định trước 7
m) Phép đo ban đầu* 8
n) Khảo sát đáp ứng rung 9.2
o) Phép đo trung gian 10
p) Phục hồi 11
q) Phép đo kết thúc* 12
14. Thông tin cần nêu trong hồ sơ thử nghiệm
Báo cáo thử nghiệm tối thiểu phải thể hiện các thông tin sau:
a) Khách hàng b) Phòng thử nghiệm c) Ngày thử nghiệm d) Kiểu thử nghiệm | (tên và địa chỉ)
(thử nghiệm tổng hợp SRS, rung v.v...) |
e) Mục đích thử nghiệm | (nghiên cứu phát triển, chứng nhận chất lượng, v.v...) |
f) Tiêu chuẩn thử nghiệm, xuất bản | (quy trình thử nghiệm liên quan) |
g) Mô tả mẫu thử nghiệm | (nhận dạng tính đơn nhất bản vẽ, ảnh v.v...) |
h) Lắp đặt mẫu thử nghiệm | (nhận biết vật cố định, bản vẽ, ảnh, v.v...) |
i) Tính năng của trang bị thử nghiệm | (dung sai tín hiệu, chuyển động ngang v.v...) |
j) Hệ thống đo, vị trí đặt cảm biến | (mô tả, bản vẽ, ảnh v.v...) |
k) Độ không đảm bảo của hệ thống đo | Dữ liệu về độ không đảm bảo, lần cuối cùng và lần tiếp theo) |
I) Phép đo ban đầu, trung gian và kết thúc |
|
m) Mức khắc nghiệt yêu cầu (từ quy định kỹ thuật liên quan) | (từ quy định kỹ thuật liên quan) |
n) Mức khắc nghiệt của thử nghiệm kèm theo tài liệu | (các điểm đo, phổ từ thử nghiệm, v.v...) |
Quan sát trong quá trình tiến hành thử nghiệm và hành động cần thực hiện |
|
p) Tóm tắt thử nghiệm q) Phân bố |
|
CHÚ THÍCH: Nên viết lịch trình thử nghiệm, bao gồm mô tả thử nghiệm được thực hiện như thế nào, ví dụ như bản liệt kê các thử nghiệm theo trình tự thời gian cùng với các tham số, các quan sát được tiến hành trong quá trình thử nghiệm cũng như cung cấp các tờ dữ liệu về các phép đo được thực hiện. Lịch trình thử nghiệm có thể gán vào báo cáo thử nghiệm.
Hình 1 - Ví dụ về đáp ứng điển hình của máy dao động được kích thích bởi biểu đồ gia tốc quy định (giá trị ngưỡng quy định là 70 %)
Hình 2 - Ví dụ về nhận biết đỉnh của đáp ứng cao hơn giá trị ngưỡng quy định (70 %)
Hình 3 - Biểu đồ loga điển hình của một phổ đáp ứng yêu cầu
Hình 4- Biểu đồ gia tốc điển hình

Hình 5 - Lưu đồ dùng cho thử nghiệm với biểu đồ gia tốc thử nghiệm tổng hợp 9.4
PHỤ LỤC A
(tham khảo)
Biểu đồ gia tốc thử nghiệm - Thông tin chung
A.1. Yêu cầu chung
Nguồn gốc của biểu đồ gia tốc thử nghiệm từ SRS không phải là một quy trình toán học chính xác hoặc duy nhất. Nhiều biểu đồ gia tốc thử nghiệm có thể được bắt nguồn từ một SRS duy nhất. Hơn nữa, do sức ép thực tế về trang bị thử nghiệm thường đồng nghĩa với SRS không thể có độ chính xác phù hợp. Kết quả là, không thể đạt được một cách tin cậy và tái lặp của biểu đồ gia tốc xóc cụ thể nếu chỉ xác định bởi một mình SRS. Do đó khuyến cáo rằng nguồn gốc của biểu đồ gia tốc thử nghiệm luôn luôn được thỏa thuận với bên quy định thử nghiệm.
Có nhiều phương pháp mà nhờ đó biểu đồ gia tốc thử nghiệm có thể được bắt nguồn từ SRS. Nói chung mỗi phương pháp khác nhau tạo ra biểu đồ gia tốc thử nghiệm với các đặc tính khác nhau và cũng đề cập khác nhau với sức ép thực tế của các hạn chế về trang bị thử nghiệm. Ngoài ra, sự thực hiện khác nhau (máy tính) của phương pháp khác nhau có thể chi phối các giới hạn và giả định của chúng. Thường thì các giới hạn và giả định này được sử dụng để đạt được độ tin cậy và tái lặp theo sự phát sinh của biểu đồ gia tốc thử nghiệm.
Tiêu chí thứ nhất trong việc lựa chọn một phương pháp thích hợp đối với nguồn gốc của một biểu đồ gia tốc thử nghiệm từ một SRS là việc xem xét các đặc tính của biểu đồ gia tốc yêu cầu. Việc lựa chọn thường phụ thuộc vào các đặc tính của biểu đồ gia tốc gốc mà từ đó các SRS trong quy định kỹ thuật liên quan rút ra. Tuy nhiên, nếu đặc tính toàn vẹn của biểu đồ gia tốc gốc là không có khả năng tái lập, thì cần xác định các khía cạnh cụ thể của đặc tính cần phải tái lập trong biểu đồ gia tốc thử nghiệm. Nói chung, đặc tính của biểu đồ gia tốc gốc phụ thuộc vào các điều kiện làm việc gây ra xóc và vị trí của hạng mục cần xem xét, liên quan đến nguồn gây xóc. Trong nhiều trường hợp, các khía cạnh quan tâm của đặc tính của xóc được tái lập theo biểu đồ gia tốc thử nghiệm cũng sẽ phụ thuộc vào độ nhạy của mẫu thử nghiệm.
Tiêu chí thứ hai trong việc lựa chọn một phương pháp thích hợp cho nguồn gốc của một biểu đồ gia tốc thử nghiệm từ SRS là việc xem xét các áp đặt thực tế bởi các hạn chế của trang bị thử nghiệm. Để cho phép một biểu đồ gia tốc xóc được đặt bởi máy phát rung động hoặc máy phát rung động cơ hơi nước, gia tốc ban đầu, gia tốc cuối và vận tốc phải bằng không. Đồng thời, bất kỳ máy thử nghiệm nào, các giá trị lớn nhất của gia tốc, vận tốc và độ dịch chuyển phải nằm trong giới hạn đặt bình thường của máy. Tất cả những áp đặt đáng kể lên biểu đồ gia tốc có thể được áp dụng thực tế bởi hệ thống máy phát rung. Nói chung, những áp đặt từ hệ thống máy phát rung có ảnh hưởng lớn nhất khi cố gắng để tái tạo một cú xóc có nguồn gốc tại hoặc gần với nguồn của nó. Tái tạo một biểu đồ gia tốc bị chi phối bởi các đáp ứng về cấu trúc, điển hình là những quan sát từ một số khoảng cách từ nguồn xóc, có nhiều khả năng không có những hạn chế đáng kể mà hệ thống máy phát rung áp đặt.
A.2. Tái tạo một biểu đồ gia tốc kinh điển
Tái tạo một biểu đồ gia tốc kinh điển, ví dụ như một xung nửa sin hoặc một xung răng cưa đỉnh cuối trên một máy phát rung thường rất khó để đạt được do áp đặt thực tế bởi các hạn chế của trang bị thử nghiệm. Tuy nhiên, tổng hợp và thử nghiệm với SRS của biểu đồ gia tốc kinh điển là hợp lý, tin cậy và và có khả năng tái lặp. Điều này là do SRS của các xung kinh điển về đại thể là duy nhất, và với điều kiện là SRS yêu cầu là đại diện tốt của xung gốc, biểu đồ gia tốc thử nghiệm được rút ra là tương xứng hợp lý với xung gốc. Tái tạo có thể được tăng cường hơn nữa bằng cách trích dẫn thông tin bổ sung như giá trị đỉnh và thời gian điển hình. Khó khăn chính trong việc áp dụng biểu đồ gia tốc kinh điển trên hệ thống máy phát rung là đảm bảo rằng biểu đồ gia tốc thử nghiệm có gia tốc và vận tốc ban đầu và kết thúc bằng không. Điều này thường yêu cầu bổ sung một xung bù, thường là một xung có đỉnh âm có giá trị thấp hơn và có thời gian dài hơn so với xung yêu cầu. Giá trị đỉnh, hình dạng và thời gian của xung bù, được đặt trước và làm nhiệm vụ của xung danh nghĩa, được đặt để đảm bảo rằng biểu đồ gia tốc thử nghiệm có gia tốc và vận tốc ban đầu và kết thúc bằng không.
A.3. Đáp ứng hình sin suy giảm
Rất ít hạng mục của thiết bị trải qua các xóc ở dạng xung kinh điển. Nhiều hạng mục của thiết bị trải qua ảnh hưởng của xóc thay đổi bởi các đặc tính động của cấu trúc. Đáp ứng như vậy được đặc trưng bởi dao động và biểu đồ gia tốc thời gian ngắn. Trong trường hợp đơn giản nhất, các đáp ứng này sẽ ở dạng hình sin suy giảm tần số đơn. Thông thường, đó là dạng tổng hợp của các thành phần đáp ứng riêng. Nói chung, các dao động và biểu đồ gia tốc phức hợp, dễ áp dụng hơn trên máy phát rung.
Một đáp ứng hình sin suy giảm là điển hình của đáp ứng đã trải qua thiết bị tương đối gần với nguồn xóc. SRS của một hình sin suy giảm tần số đơn là mô tả đặc biệt và biểu đồ gia tốc thử nghiệm được rút ra là tương xứng hợp lý so với gốc. Tuy nhiên, khi đáp ứng chứa nhiều hơn một thành phần tần số đơn, biểu đồ gia tốc thử nghiệm được rút ra là không có nhiều khả năng tương xứng hợp lý so với gốc, trừ khi thông tin được cung cấp bổ sung. Trong các trường hợp như vậy, thông tin được cung cấp bổ sung bao gồm toàn bộ giá trị đỉnh, tần số, tắt dần của mỗi thành phần cũng như độ lớn liên quan của mỗi thành phần. Tái lập một biểu đồ gia tốc thử nghiệm là một hình sin suy giảm phức tạp thường được thực hiện khi đáp ứng đỉnh và “thời gian tăng” của xung được xem là quan trọng.
Các phương pháp có sẵn dùng để xác định biểu đồ gia tốc hình sin suy giảm từ SRS là dẫn chứng bằng tài liệu và vật tương tự. Khi các phương pháp là tương tự nhau, việc thực hiện khác nhau của các phương pháp thường áp đặt những hạn chế đảm bảo mức độ lặp lại của biểu đồ gia tốc thử nghiệm cuối cùng. Đặc biệt, các hạn chế này thường ngăn cản việc đạt được một biểu đồ gia tốc thử nghiệm là một tương xứng hợp lý của của đáp ứng gốc. Hầu như tất cả các phương pháp phù hợp với SRS của biểu đồ gia tốc thử nghiệm như của SRS yêu cầu chỉ ở các tần số của hình sin suy giảm. Trong khi có sẵn một số quy trình để cải thiện sự phù hợp với tần số trung gian, không có những đảm bảo tương xứng hợp lý. Nhìn chung, tương xứng hợp lý có thể đạt được tại các tần số của hình sin suy giảm nhưng đòi hỏi dung sai lớn hơn ở tần số trung gian. Hạn chế thực tế thường hạn chế số lượng các thành phần hình sin suy giảm có thể được sử dụng.
Một đáp ứng hình sin suy giảm hầu như luôn yêu cầu bổ sung một xung bù thích hợp để đảm bảo rằng biểu đồ gia tốc thử nghiệm có gia tốc và vận tốc ban đầu và cuối cùng bằng không. Trong khi xung bù ít nghiêm trọng hơn sẽ được yêu cầu đối với xóc kinh điển thì biểu đồ gia tốc vẫn còn ảnh hưởng đến SRS của biểu đồ gia tốc thử nghiệm. Nằm trong hạn chế thực tế của các máy phát rung, một số trục linh hoạt tồn tại như tần số của xung bù. Nói chung, thấp hơn tần số của xung bù thì tốt hơn.
A.4. Đáp ứng dao động phức tạp
Một biểu đồ gia tốc dao động và thời gian ngắn bị chi phối bởi đặc tính động học của cấu trúc xen kẽ là điển hình của nhiều đáp ứng xóc. Khi các đặc trưng của nguồn xóc là không đáng kể, một biểu đồ gia tốc thử nghiệm có thể được rút ra từ một SRS bằng một số phương pháp khác nhau. Phương pháp nào được sử dụng thì biểu đồ gia tốc thử nghiệm cũng không thể là một tương xứng hợp lý của biểu đồ gốc trừ khi có thêm thông tin được cung cấp. Trong trường hợp này, thông tin bổ sung điển hình có thể bao gồm các giá trị các đỉnh cao tổng thể cũng như tần số và độ lớn tương đối của mỗi thành phần trong đáp ứng gốc.Tái lập một biểu đồ gia tốc thử nghiệm là một đáp ứng dao động phức tạp thường được thực hiện khi đáp ứng đỉnh của thiết bị xem xét xảy ra ngay lập tức sau khi đặt các xóc nguồn.
Các phương pháp có sẵn dùng để xác định đáp ứng dao động phức tạp từ SRS là khác nhau. Khi các phương pháp khác nhau và, thực hiện khác nhau thường áp đặt những hạn chế đảm bảo mức độ lặp lại của biểu đồ gia tốc thử nghiệm cuối cùng. Đặc biệt, các hạn chế này thường ngăn cản việc đạt được một biểu đồ gia tốc thử nghiệm là một tương xứng hợp lý của của đáp ứng gốc. Hầu như tất cả các phương pháp phù hợp với SRS của biểu đồ gia tốc thử nghiệm như của SRS yêu cầu chỉ ở các tần số riêng. Nhìn chung, có thể đạt được tương xứng hợp lý tại các tần số riêng nhưng đòi hỏi dung sai lớn hơn ở tần số trung gian.
Một số phương pháp có sẵn để xác định một đáp ứng dao động phức tạp từ SRS đòi hỏi bổ sung một xung bù thích hợp để đảm bảo rằng biểu đồ gia tốc thử nghiệm có gia tốc và vận tốc ban đầu và cuối cùng bằng không. Tuy nhiên một số phương pháp được thiết kế để cung cấp gia tốc và vận tốc ban đầu và cuối cùng bằng không mà không bổ sung xung bù. Khi một xung bù được yêu cầu, nó ít quan trọng hơn so với biểu đồ gia tốc thử nghiệm xóc kinh điển hoặc biểu đồ gia tốc hình sin suy giảm.
PHỤ LỤC B
(tham khảo)
Các tham số sử dụng khi tổng hợp biểu đồ gia tốc thử nghiệm
B.1. Yêu cầu chung
Yêu cầu môi trường để thử nghiệm các mẫu có thể được bắt nguồn từ:
- đo dữ liệu trường đối với mẫu cần quan tâm,
- môi trường xóc dự báo dựa trên cơ sở dữ liệu trường của thiết bị tương tự,
- môi trường xóc tính toán.
Đo và phân tích dữ liệu trường đối với môi trường xóc phải được thực hiện cùng với việc quan tâm đến phạm vi hoạt động lớn thường yêu cầu dải động lực lớn trong các phép đo. Tham khảo [1]1 cho các hướng dẫn có giá trị và xem trên phụ lục này.
Yêu cầu thử nghiệm SRS phải bắt nguồn từ các nguồn đề cập ở trên. Các yêu cầu phải bao gồm một số tham số quy định mô tả môi trường thử nghiệm xóc. Điều này có thể bao gồm các tham số mô tả
- thời gian xóc,
- giá trị đỉnh của xóc,
- thánh phần tần số của xóc,
- SRS.
Các tham số cần thiết để thử nghiệm phụ thuộc vào mục đích của thử nghiệm. Một số tham số được quan tâm khi thử nghiệm về độ lớn, nhưng một số khác lại quan tâm về mỏi chu kỳ thấp.
B.2. Tham số liên quan đến thời gian của trường hợp xóc
Các tham số sau đây có thể được sử dụng để mô tả khoảng thời gian 7 của trường hợp xóc:
- phần chính của biểu đồ gia tốc;
- ảnh hưởng của xóc/ thời gian rung ngắn.
Phần chính của biểu đồ gia tốc được xác định như là một phần của biểu đồ gia tốc từ khi tín hiệu đạt 25 % của giá trị lớn nhất cho đến khi tín hiệu giảm xuống lần cuối cùng tới mức 25 %.
Dải tần đối với biểu đồ gia tốc thử nghiệm phải được xác định cẩn thận vì nó có ảnh hưởng đến đặc trưng của biểu đồ gia tốc và do đó đến giá trị lớn nhất và đến phần chính của biểu đồ gia tốc. Khi có liên quan với dải tần số, tần số lấy mẫu phải được xác định như là bộ lọc qua lại, ở cả đầu cao lẫn đầu thấp của dải tần.
Ảnh hưởng của xóc/thời gian rung ngắn được xác định như sau (theo MIL-STD-810F, phương pháp thử nghiệm 516.5):
- Thời gian tối thiểu chứa ít nhất 90 % giá trị hiệu dụng biểu đồ gia tốc vượt quá 10 % độ lớn giá trị hiệu dụng đỉnh của biểu đồ gia tốc kết hợp với trường hợp xóc.
Phương pháp này là ít nhạy với các đỉnh tạp v.v..., nhưng dải tần số và các tham số khác phải được quy định như nêu ở trên cũng như các tham số dùng để tính giá trị hiệu dụng biểu đồ gia tốc.
B.3. Tham số liên quan đến giá trị đỉnh của trường hợp xóc
Các tham số sau đây được sử dụng để mô tả giá trị đỉnh của trường hợp xóc:
- giá trị lớn nhất và giá trị nhỏ nhất của biểu đồ gia tốc;
- mật độ xác suất của biểu đồ gia tốc;
- dãy các đỉnh (dương và âm) của biểu đồ gia tốc;
- lưu lượng mưa dùng để đếm biểu đồ gia tốc.
Dải tần số của biểu đồ gia tốc và các tham số khác phải được xác định như nêu ở trên vì nó có ảnh hưởng đáng kể lên đặc trưng của biểu đồ gia tốc ở giá trị lớn nhất và giá trị nhỏ nhất của nó.
Tất cả các phương pháp đưa ra giá trị lớn nhất và nhỏ nhất của biểu đồ gia tốc, phải bằng giá trị tiệm cận tần số cao (HFA) của SRS.
Hai cạnh nhỏ nhất của biểu đồ gia tốc cho thấy là tốt nhất khi sử dụng là phương pháp thứ hai và thứ ba. Hai phương pháp cuối là chỉ số tốt nhất đối với ảnh hưởng của mỏi và cũng có thể được sử dụng cho nghiên cứu biểu đồ gia tốc đáp ứng là “các đỉnh cao của đáp ứng”. Xem dưới đây.
Một phương pháp khác để xác định đỉnh là tính toán các mặt cắt mức.
B.4. Tham số liên quan đến thành phần tần số cơ bản của trường hợp xóc
Các tham số dưới đây có thể được sử dụng để mô tả thành phần tần số của trường hợp xóc:
- Dải tần số;
- Phổ Fu-ri-ê (FS);
- Mật độ phổ năng lượng (ESD);
- Giá trị hiệu dụng lũy kế tính từ FS hoặc ESD.
Dải tần số dùng cho biểu đồ gia tốc phải được xác định để có có khả năng tái lập tốt thử nghiệm. Vì một lý do này, nó cũng rất quan trọng để xác định tần số lấy mẫu và bộ lọc của biểu đồ gia tốc liên quan đến cả dải tần số yêu cầu để thử nghiệm.
FS và ESD được mô tả là chứa tần số của biểu đồ gia tốc và có thể chỉ ra thành phần tần số đáng chú ý. ESD bình thường hóa phổ cả về độ phân giải tần số để sử dụng cho phân tích lẫn thời gian của biểu đồ gia tốc. Sai số thống kê của các phép phân tích có thể được giảm nhờ lấy trung bình thành phần tần số liền kề trong phổ.
Giá trị hiệu dụng lũy kế của FS hoặc ESD phản ánh chứa đựng tần số của phổ theo cách lũy kế và cũng có thể cung cấp các giá trị bằng số có thể giải thích được.
B.5. Tham số dùng cho SRS
Các tham số sau đây được sử dụng để mô tả SRS:
- Hệ số Q dùng để tính SRS;
- Phần chính của SRS;
- Kiểu của đỉnh SRS.
Cách thể hiện phổ biến nhất của SRS là SRS lớn nhất gia tốc. Các thể hiện khác là phổ đáp ứng vận tốc giả lớn nhất hoặc phổ đáp ứng dịch chuyển tương đối.
Thuật toán để tính SRS cũng phải được ấn định.
Khuyến cáo rằng SRS có thể tính được từ dữ liệu đo được hoặc dữ liệu tính toán cùng với một số hệ số Q, ví dụ 5, 10 và 25 (tỷ số tắt dần 10 %, 5 %, và 2 %). Các đường cong phản ánh đáp ứng bên trong có thể có của các mẫu thử nghiệm tùy thuộc vào tần số cộng hưởng bên trong của chúng và tần số tắt dần.
Phần chính của SRS được xác định (theo IEC 60068-2-57) là phần của phổ trong đó gia tốc đáp ứng là cao hơn -3 dB băng thông của SRS (xem Hình B.1).
Bản chất của đỉnh SRS có thể được mô tả bằng cách so sánh phổ đáp ứng với các hệ số Q khác nhau đối với trường hợp xóc nhất định. Ví dụ so sánh cho thấy nếu trường hợp xóc là kiểu xung hoặc kiểu dao động. Có thể xác định các hệ số:
A= (SRS đỉnh)Q=20/( SRS đỉnh)Q=10
B=đỉnh SRS/HFA
Giá trị thấp của các hệ số này cho thấy một xung xóc (ví dụ, xung nửa sin) và các xóc dao động có giá trị cao với các giá trị giới hạn trong trường hợp rung hình sin liên tục.
B.6. Các tham số khác đặc trưng cho trường hợp xóc
Các tham số đặc trưng khác có thể sử dụng để mô tả trường hợp xóc là:
- Số lượng các đỉnh cao của biểu đồ gia tốc đáp ứng của SRS được tính để lựa chọn tần số tự nhiên;
- Thời điểm của xác suất phân bổ, như là độ lệch và độ nhọn.
Số lượng các đỉnh cao của biểu đồ gia tốc đáp ứng của SRS có thể được tính để lựa chọn các tần số tự nhiên trong dải tần đối với hệ số Q được chọn của SRS.
Hệ số Q phải đại diện cho hạng mục thử nghiệm. Hệ số Q bằng 10 là giá trị mặc định.
Số lượng các đỉnh cao được xác định là đỉnh đáp ứng tính được của hệ một bậc tự do (máy dao động), được kích thích bởi giá trị ngưỡng quy định. Nếu không có quy định khác trong quy định kỹ thuật liên quan, số lượng các đỉnh cao phải nằm trong dải từ 3 đến 20, liên quan đến giá trị ngưỡng 70 % đối với tỷ số tắt dần là 2 % đến 10 %.
Các đỉnh đáp ứng có thể được tiếp tục phân tích bằng cách sử dụng tiêu chí cấp đỉnh, tính toán mặt cắt mức, và phổ hư hại do mỏi (FDS).
Thời điểm xác suất phân bổ như là độ lệch và độ nhọn có thể được sử dụng để đặc trưng cho trường hợp xóc. Chúng cũng có thể được thể hiện là giá trị trung bình liên tiếp. Độ xiên chỉ ra hai cạnh của biểu đồ gia tốc, trong khi độ nhọn chỉ ra mức độ của các đỉnh ở biểu đồ gia tốc so với hai cạnh của nó.
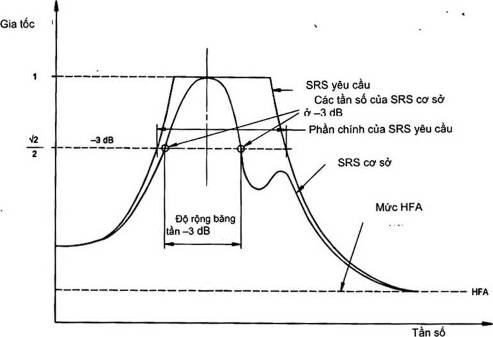
Hình B.1 - Phần chính của SRS
PHỤ LỤC C
(tham khảo)
Cách tổng hợp một biểu đồ gia tốc thử nghiệm
C.1. Giới thiệu
Hầu hết các nhà cung ứng hệ thống điều khiển dùng cho máy phát rung điện động đều có phần mềm thử nghiệm SRS quy định. Với công cụ này, người thao tác có thể tạo ra một quá độ điện áp so với thời gian như một tín hiệu truyền động cho bộ khuếch đại công suất của máy phát rung.
Thử nghiệm SRS ở bàn máy phát rung, sau khi tái lặp một số bước, sẽ tương xứng với SRS yêu cầu. Tín hiệu được tạo ra bằng cách trộn một số đơn vị tần số (gợn sóng), khác nhau về hình dạng, tần số và chiều dài, trong một cửa sổ thời gian quy định. Bằng cách này, cần tính đến các hạn chế của hệ thống máy phát rung.
C.2. Các hạn chế của trang bị thử nghiệm rung
Trong nhiều trường hợp, SRS yêu cầu, được quy định trong quy định kỹ thuật liên quan có liên quan đến tần số cao. Điều này thường xảy ra bởi SRS không có giới hạn về tần số và mở rộng tần số đến vô hạn. SRS sẽ tiệm cận đến một giá trị bằng đỉnh lớn nhất của biểu đồ gia tốc tương ứng ở tần số
Liên quan đến quy định kỹ thuật liên quan, các hạn chế quan trọng nhất của trang bị thử nghiệm là dải tần số, công suất đầu ra của bộ khuếch đại và độ bền cơ của phần cứng máy phát rung mô tả bởi gia tốc đỉnh lớn nhất cho phép. Các giá trị dành cho các tham số giới hạn phụ thuộc vào máy phát rung và bộ khuếch đại riêng biệt. Đối với máy phát rung điện động tiêu chuẩn có lực 80 kN tốc độ điều khiển bằng bộ khuếch đại 96 kVA, giới hạn tần số cao là 2 500 - 3 000 Hz và đáp ứng lớn nhất nằm trong khoảng 350 gn đến 400 gn. với máy phát rung điện động đặc biệt, có thể đạt được giá trị cao hơn.
C.3. Đặc điểm của phần mềm điều khiển SRS
Các tham số dưới đây có thể được chọn trong hầu hết phần mềm điều khiển, khi tổng hợp một biểu đồ gia tốc SRS:
a) Loại gợn sóng (phổ biến nhất được sử dụng)
1) Hình sin suy giảm theo hàm mũ,
2) Đột biến sin với biên độ không đổi (hình sin nằm trong cửa sổ hình chữ nhật),
3) Đột biến sin với biên độ thay đổi (hình sin nằm trong cửa sổ Hanning)
Người vận hành phải quyết định loại gợn sóng nào để lựa chọn. Không thể có khuyến cáo về loại quy định vì mục đích thực hiện đầy đủ SRS có thể đạt được nhiều hoặc ít hơn. Pha trộn các loại gợn sóng khác nhau là không thể.
b) Cửa sổ thời gian
Đây là khung thời gian mà trong tất cả loại gợn sóng sẽ được pha trộn và nó sẽ hạn chế thời gian của biểu đồ gia tốc tổng hợp dùng để thử nghiệm.
c) Khoảng cách tần số của gợn sóng
Bắt đầu với tần số thấp nhất của SRS, tần số của mỗi gợn sóng sẽ được tự động xác định theo khoảng cách của 1/n-octave trong đó “n” là biến và phải được lựa chọn cho từng biểu đồ gia tốc.
d) Khoảng thời gian của mỗi gợn sóng
- Loại 1): không có lựa chọn thời gian nhưng có lựa chọn hệ số tắt dần cho gợn sóng.
- Loại 2): lựa chọn số lượng bằng nhau của các nửa chu kỳ.
- Loại 3): lựa chọn số lượng không bằng nhau của các chu kỳ trong cửa sổ Hanning.
e) Thời gian bắt đầu của mỗi gợn sóng
Khoảng thời gian trễ từ khi bắt đầu của cửa sổ thời gian phải được lựa chọn so cho khoảng thời gian đầy đủ của gợn sóng sẽ tìm thấy một vị trí nằm trong cửa sổ thời gian được xác định.
f) Hệ số tắt dần
Chỉ được sử dụng cho gợn sóng của loại 1).
g) Cực tính bắt đầu
Mỗi gợn sóng có thể bắt đầu theo hướng dương hoặc âm.
C.4. Cách tạo ra quá độ xóc
SRS với hệ số Q và các tham số quan tâm khác phải được quy định trong quy định kỹ thuật liên quan. Biểu đồ gia tốc gốc, là cơ sở của SRS trong quy định kỹ thuật liên quan, không phải luôn được biết đến. Nó là sự quan tâm của người vận hành để so sánh biểu đồ gia tốc với biểu đồ gia tốc tổng hợp nếu thuộc đối tượng áp dụng.
Các bước để một biểu đồ gia tốc tổng hợp hợp lý được tóm tắt và dẫn giải như sau:
a) Loại gợn sóng
Mỗi loại gợn sóng đều dẫn đến nhiều hơn hoặc ít hơn kết quả mong muốn.
Hình sin suy giảm theo hàm mũ (loại 1)) với mức cao tại thời điểm bắt đầu của gợn sóng là rất hữu ích để mô phỏng một xóc bởi nhiệt nhưng nó cũng thường dẫn đến giá trị đỉnh gia tốc cao nhất ở biểu đồ gia tốc tổng hợp.
Hình sin suy giảm theo hàm số mũ là dễ dàng nhất để hình dung ảnh hưởng của mỗi gợn sóng lên tín hiệu tổng hợp khi sử dụng đột biến sin với biên độ không đổi (loại 2).
Đột biến sin với biên độ thay đổi (loại 3) thường bắt đầu với sự tăng bằng phẳng do hình dạng của cửa sổ Hanning và có giá trị cao nhất ở giữa cửa sổ thời gian.
Đột biến sin với biên độ thay đổi là dễ nhất để điều khiển khoảng thời gian của biểu đồ gia tốc tổng hợp bằng cách sử dụng gợn sóng loại 2) hoặc gợn sóng loại 3).
b) Dải tần số
Lựa chọn dải tần số thử nghiệm để xem xét các tần số lấy mẫu có sẵn. Dải tần số thử nghiệm được lựa chọn là phụ thuộc vào chứa đựng tần số lớn nhất của môi trường thử nghiệm được mô phỏng và tần số đúng có thể được tạo ra bởi trang bị thử nghiệm với mẫu đính kèm.
c) Cửa sổ thời gian
Thời gian của cửa sổ thời gian phải bao trùm khoảng thời gian yêu cầu của biểu đồ gia tốc tổng hợp. Thời gian này còn phụ thuộc vào các yếu tố khác của dải tần số được chọn và tần số lấy mẫu
Trong một số hệ thống điều khiển thử nghiệm, cửa sổ thời gian gấp đôi về thời gian và biểu đồ gia tốc tổng hợp ở giữa khung thời gian mới.
d) Khoảng tần số gợn sóng
Lựa chọn khoảng tần số là cố định cho toàn bộ dải tần. Tần số thấp nhất được lựa chọn sao cho đáp ứng đầy đủ phần tăng của SRS. Khoảng tần số gợn sóng sau đây không được nhỏ hơn 1/3-octave Với khoảng cách này, độ chính xác của -2,5 dB đạt được trong SRS (khoảng giữa hai gợn sóng lân cận). Với khoảng cách của 1/6-octave độ chính xác là tốt hơn so với - 0,5 dB. Càng có nhiều gợn sóng phải xử lý, càng có nhiều phức tạp để điều chỉnh nó.
e) Thời gian gợn sóng
Thời gian gợn sóng được xác định bởi số chu kỳ hoặc nửa chu kỳ ngoại trừ hình sin suy giảm. Khoảng thời gian chứa đựng tần số thấp được giới hạn bởi các cửa sổ thời gian được lựa chọn cho biểu đồ gia tốc tổng hợp.
Số chu kỳ của mỗi gợn sóng phải được lựa chọn giữa 3 và 10.
Với hệ số Q là 10, khuếch đại thực sự của một gợn sóng đơn trong SRS là 60 % với 3 chu kỳ, 81 % với 5 chu kỳ và 97 % với 12 chu kỳ. Tuy nhiên có ảnh hưởng khác. Hai tần số lân cận (1/3-octave) sẽ ảnh hưởng lẫn nhau và khuếch đại đầy đủ là 10 sẽ thường xuyên đạt được với 10 chu kỳ. Nếu khoảng cách là 1/6-octave khuếch đại là 10 đạt được với 7 chu kỳ.
f) Giá trị đỉnh của gợn sóng
Ở giai đoạn phát sinh quá độ, giá trị đỉnh gia tốc của mỗi gợn sóng có thể được đặt đến 1/Q giá trị quy định ở SRS. Các giá trị này được điều chỉnh bởi phần mềm điều khiển tự động trong quá trình tái lặp.
g) Thời gian bắt đầu của gợn sóng
Thời gian bắt đầu (thời gian trễ) của mỗi gợn sóng có thể được lựa chọn riêng, có tính đến gợn sóng cần nằm trong trong cửa sổ thời gian được chọn. Đặc biệt, các gợn sóng có tần số trong hai octaves thấp nhất phải được bắt đầu ở zero, hoặc gần zero, do khoảng thời gian của chúng. Gợn sóng có giá trị đỉnh cao nhất nên được bố trí khác trên nửa thứ nhất của cửa sổ thời gian mà không có sự xếp chồng. Điều này được thực hiện để tránh giá trị đỉnh quá cao trong biểu đồ gia tốc tổng hợp và để đạt được hình dạng suy giảm của biểu đồ gia tốc. Tất cả gợn sóng còn lại phải đặt trong cửa sổ thời gian, tránh các đoạn xếp chồng kéo dài.
Sẽ rất có ích để biết trong quá trình thử nghiệm nơi các gợn sóng khác nhau nằm trong cửa sổ thời gian được đặt, vì đôi khi nó là cần thiết để thay đổi vị trí của chúng. Trường hợp này là có thể nếu sự pha trộn của gợn sóng gây ra các đỉnh gia tốc cao hoặc các tham số khác cũng quá cao đối với trang bị thử nghiệm.
h) Cực tính ở bắt đầu của gợn sóng
Cực tính ở bắt đầu của một gợn sóng có thể lựa chọn là dương hoặc âm, tạo ra đỉnh thứ nhất của gợn sóng theo hướng thử nghiệm là dương hoặc âm. Đó là khuyến cáo trước tiên để chỉ sử dụng một cực tính cho tất cả các gợn sóng và để thay đổi riêng nó để tránh các đỉnh cực hạn trong biểu đồ gia tốc tổng hợp.
i) Tắt dần của gợn sóng
Lựa chọn này chỉ cần thiết khi sử dụng loại gợn sóng hình sin suy giảm theo hàm mũ (loại 1)). Khi sử dụng hình sin suy giảm, hệ số tắt dần của hình sin có thể được lựa chọn trong dải khuyến cáo từ 2 % đến 10 %.
C.5. Hoàn thành thử nghiệm
Vì thử nghiệm SRS là quy trình vòng lặp hở và biểu đồ gia tốc tổng hợp thứ nhất không tính đến các hàm truyền động học của máy phát rung bao gồm mẫu thử nghiệm gắn kèm, thử nghiệm quá trình hợp nhất hệ thống cần được bắt đầu ở - 12 dB của mức tổng hợp cuối cùng.
Thông thường chỉ một thử nghiệm trên một trục yêu cầu. Do đó nó được khuyến cáo sử dụng máy phát rung trong cấu hình “cố định thử nghiệm rỗng” hoặc, thậm chí tốt hơn, “mang tải cố định với khối lượng giả động học” trong bước này.
Trong quá trình lặp lại, tăng mức thử nghiệm theo nấc, ở nấc thứ nhất 3 dB, và ở gần mức thử nghiệm đầy đủ, theo nấc 1 dB. Vật giả phải được thay thế với mẫu thử nghiệm thực và biểu đồ gia tốc tổng hợp được nhả thêm một lần nữa với các thông số cuối cùng của nó. Có thể cần sắp xếp lại vị trí của gợn sóng hoặc thay đổi đặc các đặc tính của chúng nếu giới hạn của trang bị thử nghiệm đạt được. Sau khi điều này được thực hiện, quá trình hợp lại hệ thống được lặp lại, đó cũng là trường hợp khi các trục kích thích có thay đổi.
PHỤ LỤC D
(tham khảo)
Dải tần số được khuyến cáo cho thử nghiệm SRS
Sau đây là ví dụ về dải tần số thử nghiệm được sử dụng cho các thiết bị khác nhau.
Bảng D.1 - ví dụ về dải tần thử nghiệm
Loại thiết bị | Dải |
| Hz |
Địa chấn (thiết bị lắp trên mặt đất và thiết bị lắp trên sàn) | 1 - 35 |
CHÚ THÍCH: Trong trường hợp thiết bị có tần số tự nhiên dưới 1 Hz, dải tần số gợi ý là từ 0,1 đến 35 Hz | |
Chuyên chở | 1 - 100 |
| 10 - 100 |
| 10 - 150 |
| 10 - 500 |
Hàng không | 10 - 500 |
| 10 - 2000 |
Không gian | 100 - 5 000 |
THƯ MỤC TÀI LIỆU THAM KHẢO
ISO/DIS 15261, Vibration and sock generating systems - Vocabulary (Hệ thống tạo rung và xóc - Từ vựng)
ISO/CD 18431-2, Mechanical vibration and shock - Signal Processing - Part 2: Time domain windows for Fourier transform signal proccessing (Máy rung và xóc - Xử lý tín hiệu - Phần 2: Khoảng hở thời gian cho biến đổi Fu-ri-ê của xử lý tín hiệu)
[1] Handbook for Dynamic Data Acquisition and Analysis. (Report IES-RP-DTE 012.1, Institute of Environmental Sciences and Technologies) (Sổ tay cho thu nhận và phân tích dữ liệu động (Báo cáo IES-RP-DTE 012.1, Viện khoa học và Công nghệ Môi trường)
[2] MIL-STD-910F, Environmental Engineering Considerations and Laboratory Tests. (US Department of Defense Test Method Standard) (xem xét Kỹ thuật Môi trường và các Phòng thử nghiệm (Bộ Quốc phòng Phương pháp thử nghiệm tiêu chuẩn)
MỤC LỤC
Lời nói đầu
1. Phạm vi áp dụng
2. Tài liệu viện dẫn
3. Định nghĩa
4. Yêu cầu đối với trang thiết bị thử nghiệm
5. Yêu cầu đối với thử nghiệm
6. Mức khắc nghiệt
7. Ổn định trước
8. Phép đo ban đầu
9. Thử nghiệm
10. Phép đo trung gian
11. Phục hồi
12. Phép đo kết thúc
13. Thông tin cần nêu trong quy định kỹ thuật liên quan
14. Thông tin cần nêu trong hồ sơ thử nghiệm
Phụ lục A (tham khảo) - Biểu đồ gia tốc thử nghiệm - Thông tin chung
Phụ lục B (tham khảo) - Các tham số sử dụng khi tổng hợp biểu đồ gia tốc thử nghiệm
Phụ lục C (tham khảo) - Các tổng hợp một biểu đồ gia tốc thử nghiệm
Phụ lục D (tham khảo) - Dải tần số được khuyến cáo cho thử nghiệm SRS
Thư mục tài liệu tham khảo
[1] Hệ thống Tiêu chuẩn Quốc gia Vệt Nam đã có TCVN 7699-2-27:2007 hoàn toàn tương đương với IEC 60068-2-27:2005.
[2] Hệ thống Tiêu chuẩn Quốc gia Vệt Nam đã có TCVN 7699-2-47:2007 hoàn toàn tương đương với IEC 60068-2-47:2005.
[3] Hệ thống Tiêu chuẩn Quốc gia Vệt Nam đã có TCVN 7699-2-64:2013 hoàn toàn tương đương với IEC 60068-2-64:2008.